
 Xose Pérez
7 years ago
Xose Pérez
7 years ago
55 changed files with 4729 additions and 1988 deletions
Split View
Diff Options
-
+0 -0.github/stale.yml
-
+1 -0.gitignore
-
+1 -1README.md
-
+4 -4code/eagle.flash.1m0m1s.ld
-
+19 -0code/eagle.flash.1m0m2s.ld
-
+21 -0code/eagle.flash.4m1m4s.ld
-
+20 -0code/eagle.flash.4m3m4e.ld
-
+18 -0code/eagle.flash.512k0m1s.ld
-
+6 -1code/espurna/api.ino
-
+22 -13code/espurna/button.ino
-
+1 -1code/espurna/config/all.h
-
+1 -0code/espurna/config/arduino.h
-
+25 -0code/espurna/config/defaults.h
-
+7 -4code/espurna/config/general.h
-
+6 -0code/espurna/config/hardware.h
-
+178 -4code/espurna/config/progmem.h
-
+7 -0code/espurna/config/prototypes.h
-
+36 -2code/espurna/config/sensors.h
-
+20 -1code/espurna/config/types.h
-
+1 -1code/espurna/config/version.h
-
+44 -34code/espurna/debug.ino
-
+86 -0code/espurna/eeprom.ino
-
+4 -1code/espurna/espurna.ino
-
+6 -0code/espurna/homeassistant.ino
-
+30 -28code/espurna/led.ino
-
+636 -0code/espurna/libs/fs_math.c
-
+116 -0code/espurna/libs/fs_math.h
-
+0 -0code/espurna/libs/pwm.c
-
+13 -23code/espurna/light.ino
-
+12 -10code/espurna/mqtt.ino
-
+11 -1code/espurna/ota.ino
-
+97 -41code/espurna/relay.ino
-
+33 -9code/espurna/rfbridge.ino
-
+13 -1code/espurna/sensor.ino
-
+15 -8code/espurna/sensors/EmonSensor.h
-
+298 -0code/espurna/sensors/GeigerSensor.h
-
+4 -1code/espurna/sensors/V9261FSensor.h
-
+42 -36code/espurna/settings.ino
-
+2307 -1356code/espurna/static/index.html.gz.h
-
+4 -6code/espurna/system.ino
-
+1 -1code/espurna/telnet.ino
-
+77 -174code/espurna/utils.ino
-
+24 -5code/espurna/web.ino
-
+214 -52code/espurna/wifi.ino
-
+2 -0code/espurna/ws.ino
-
+11 -5code/html/custom.js
-
+1 -1code/html/index.html
-
+177 -163code/platformio.ini
-
+57 -0code/symbols.sh
-
BINimages/devices/geiger_espurna_configuration.png
-
BINimages/devices/geiger_espurna_status.png
-
BINimages/devices/geiger_grafana_dashboard.png
-
BINimages/devices/geiger_scope_following_pulses.png
-
BINimages/devices/geiger_scope_single_pulse.png
-
BINimages/devices/geiger_wiring_diagram.png
code/.github/stale.yml → .github/stale.yml
View File
+ 1
- 0
.gitignore
View File
+ 1
- 1
README.md
View File
code/esp8266.flash.1m0.ld → code/eagle.flash.1m0m1s.ld
View File
+ 19
- 0
code/eagle.flash.1m0m2s.ld
View File
| @ -0,0 +1,19 @@ | |||
| /* Flash Split for 1M chips, no SPIFFS */ | |||
| /* sketch 995KB */ | |||
| /* eeprom 8KB */ | |||
| /* reserved 16KB */ | |||
| MEMORY | |||
| { | |||
| dport0_0_seg : org = 0x3FF00000, len = 0x10 | |||
| dram0_0_seg : org = 0x3FFE8000, len = 0x14000 | |||
| iram1_0_seg : org = 0x40100000, len = 0x8000 | |||
| irom0_0_seg : org = 0x40201010, len = 0xf8ff0 | |||
| } | |||
| PROVIDE ( _SPIFFS_start = 0x402FA000 ); | |||
| PROVIDE ( _SPIFFS_end = 0x402FA000 ); | |||
| PROVIDE ( _SPIFFS_page = 0 ); | |||
| PROVIDE ( _SPIFFS_block = 0 ); | |||
| INCLUDE "../ld/eagle.app.v6.common.ld" | |||
+ 21
- 0
code/eagle.flash.4m1m4s.ld
View File
| @ -0,0 +1,21 @@ | |||
| /* Flash Split for 4M chips */ | |||
| /* sketch 1019KB */ | |||
| /* empty/ota? 2048KB */ | |||
| /* spiffs 992KB */ | |||
| /* eeprom 16KB */ | |||
| /* reserved 16KB */ | |||
| MEMORY | |||
| { | |||
| dport0_0_seg : org = 0x3FF00000, len = 0x10 | |||
| dram0_0_seg : org = 0x3FFE8000, len = 0x14000 | |||
| iram1_0_seg : org = 0x40100000, len = 0x8000 | |||
| irom0_0_seg : org = 0x40201010, len = 0xfeff0 | |||
| } | |||
| PROVIDE ( _SPIFFS_start = 0x40500000 ); | |||
| PROVIDE ( _SPIFFS_end = 0x405F8000 ); | |||
| PROVIDE ( _SPIFFS_page = 0x100 ); | |||
| PROVIDE ( _SPIFFS_block = 0x2000 ); | |||
| INCLUDE "../ld/eagle.app.v6.common.ld" | |||
+ 20
- 0
code/eagle.flash.4m3m4e.ld
View File
| @ -0,0 +1,20 @@ | |||
| /* Flash Split for 4M chips */ | |||
| /* sketch 1019KB */ | |||
| /* spiffs 3040KB */ | |||
| /* eeprom 16KB */ | |||
| /* reserved 16KB */ | |||
| MEMORY | |||
| { | |||
| dport0_0_seg : org = 0x3FF00000, len = 0x10 | |||
| dram0_0_seg : org = 0x3FFE8000, len = 0x14000 | |||
| iram1_0_seg : org = 0x40100000, len = 0x8000 | |||
| irom0_0_seg : org = 0x40201010, len = 0xfeff0 | |||
| } | |||
| PROVIDE ( _SPIFFS_start = 0x40300000 ); | |||
| PROVIDE ( _SPIFFS_end = 0x405F8000 ); | |||
| PROVIDE ( _SPIFFS_page = 0x100 ); | |||
| PROVIDE ( _SPIFFS_block = 0x2000 ); | |||
| INCLUDE "../ld/eagle.app.v6.common.ld" | |||
+ 18
- 0
code/eagle.flash.512k0m1s.ld
View File
| @ -0,0 +1,18 @@ | |||
| /* Flash Split for 512K chips */ | |||
| /* sketch 487KB */ | |||
| /* eeprom 20KB */ | |||
| MEMORY | |||
| { | |||
| dport0_0_seg : org = 0x3FF00000, len = 0x10 | |||
| dram0_0_seg : org = 0x3FFE8000, len = 0x14000 | |||
| iram1_0_seg : org = 0x40100000, len = 0x8000 | |||
| irom0_0_seg : org = 0x40201010, len = 0x79ff0 | |||
| } | |||
| PROVIDE ( _SPIFFS_start = 0x4027B000 ); | |||
| PROVIDE ( _SPIFFS_end = 0x4027B000 ); | |||
| PROVIDE ( _SPIFFS_page = 0x0 ); | |||
| PROVIDE ( _SPIFFS_block = 0x0 ); | |||
| INCLUDE "../ld/eagle.app.v6.common.ld" | |||
+ 6
- 1
code/espurna/api.ino
View File
+ 22
- 13
code/espurna/button.ino
View File
+ 1
- 1
code/espurna/config/all.h
View File
+ 1
- 0
code/espurna/config/arduino.h
View File
+ 25
- 0
code/espurna/config/defaults.h
View File
+ 7
- 4
code/espurna/config/general.h
View File
+ 6
- 0
code/espurna/config/hardware.h
View File
+ 178
- 4
code/espurna/config/progmem.h
View File
+ 7
- 0
code/espurna/config/prototypes.h
View File
+ 36
- 2
code/espurna/config/sensors.h
View File
+ 20
- 1
code/espurna/config/types.h
View File
+ 1
- 1
code/espurna/config/version.h
View File
| @ -1,5 +1,5 @@ | |||
| #define APP_NAME "ESPURNA" | |||
| #define APP_VERSION "1.12.7a" | |||
| #define APP_VERSION "1.13.0c" | |||
| #define APP_REVISION "db84006" | |||
| #define APP_AUTHOR "xose.perez@gmail.com" | |||
| #define APP_WEBSITE "http://tinkerman.cat" | |||
+ 44
- 34
code/espurna/debug.ino
View File
+ 86
- 0
code/espurna/eeprom.ino
View File
| @ -0,0 +1,86 @@ | |||
| /* | |||
| EEPROM MODULE | |||
| */ | |||
| #include <EEPROM_Rotate.h> | |||
| // ----------------------------------------------------------------------------- | |||
| bool eepromRotate(bool value) { | |||
| // Enable/disable EEPROM rotation only if we are using more sectors than the | |||
| // reserved by the memory layout | |||
| if (EEPROMr.size() > EEPROMr.reserved()) { | |||
| if (value) { | |||
| DEBUG_MSG_P(PSTR("[EEPROM] Reenabling EEPROM rotation\n")); | |||
| } else { | |||
| DEBUG_MSG_P(PSTR("[EEPROM] Disabling EEPROM rotation\n")); | |||
| } | |||
| EEPROMr.rotate(value); | |||
| } | |||
| } | |||
| String eepromSectors() { | |||
| String response; | |||
| for (uint32_t i = 0; i < EEPROMr.size(); i++) { | |||
| if (i > 0) response = response + String(", "); | |||
| response = response + String(EEPROMr.base() - i); | |||
| } | |||
| return response; | |||
| } | |||
| #if TERMINAL_SUPPORT | |||
| void _eepromInitCommands() { | |||
| settingsRegisterCommand(F("EEPROM.DUMP"), [](Embedis* e) { | |||
| EEPROMr.dump(settingsSerial()); | |||
| DEBUG_MSG_P(PSTR("\n+OK\n")); | |||
| }); | |||
| settingsRegisterCommand(F("FLASH.DUMP"), [](Embedis* e) { | |||
| if (e->argc < 2) { | |||
| DEBUG_MSG_P(PSTR("-ERROR: Wrong arguments\n")); | |||
| return; | |||
| } | |||
| uint32_t sector = String(e->argv[1]).toInt(); | |||
| uint32_t max = ESP.getFlashChipSize() / SPI_FLASH_SEC_SIZE; | |||
| if (sector >= max) { | |||
| DEBUG_MSG_P(PSTR("-ERROR: Sector out of range\n")); | |||
| return; | |||
| } | |||
| EEPROMr.dump(settingsSerial(), sector); | |||
| DEBUG_MSG_P(PSTR("\n+OK\n")); | |||
| }); | |||
| } | |||
| #endif | |||
| // ----------------------------------------------------------------------------- | |||
| void eepromSetup() { | |||
| #ifdef EEPROM_ROTATE_SECTORS | |||
| EEPROMr.size(EEPROM_ROTATE_SECTORS); | |||
| #else | |||
| // If the memory layout has more than one sector reserved use those, | |||
| // otherwise calculate pool size based on memory size. | |||
| if (EEPROMr.size() == 1) { | |||
| if (EEPROMr.last() > 1000) { // 4Mb boards | |||
| EEPROMr.size(4); | |||
| } else if (EEPROMr.last() > 250) { // 1Mb boards | |||
| EEPROMr.size(2); | |||
| } | |||
| } | |||
| #endif | |||
| EEPROMr.offset(EEPROM_ROTATE_DATA); | |||
| EEPROMr.begin(EEPROM_SIZE); | |||
| #if TERMINAL_SUPPORT | |||
| _eepromInitCommands(); | |||
| #endif | |||
| } | |||
+ 4
- 1
code/espurna/espurna.ino
View File
+ 6
- 0
code/espurna/homeassistant.ino
View File
+ 30
- 28
code/espurna/led.ino
View File
+ 636
- 0
code/espurna/libs/fs_math.c
View File
| @ -0,0 +1,636 @@ | |||
| /** | |||
| * This code is available at | |||
| * http://www.mindspring.com/~pfilandr/C/fs_math/ | |||
| * and it is believed to be public domain. | |||
| */ | |||
| /* BEGIN fs_math.c */ | |||
| #include "fs_math.h" | |||
| #include <float.h> | |||
| /* | |||
| ** pi == (atan(1.0 / 3) + atan(1.0 / 2)) * 4 | |||
| */ | |||
| static double fs_pi(void); | |||
| static long double fs_pil(void); | |||
| double fs_sqrt(double x) | |||
| { | |||
| int n; | |||
| double a, b; | |||
| if (x > 0 && DBL_MAX >= x) { | |||
| for (n = 0; x > 2; x /= 4) { | |||
| ++n; | |||
| } | |||
| while (0.5 > x) { | |||
| --n; | |||
| x *= 4; | |||
| } | |||
| a = x; | |||
| b = (1 + x) / 2; | |||
| do { | |||
| x = b; | |||
| b = (a / x + x) / 2; | |||
| } while (x > b); | |||
| while (n > 0) { | |||
| x *= 2; | |||
| --n; | |||
| } | |||
| while (0 > n) { | |||
| x /= 2; | |||
| ++n; | |||
| } | |||
| } else { | |||
| if (x != 0) { | |||
| x = DBL_MAX; | |||
| } | |||
| } | |||
| return x; | |||
| } | |||
| double fs_log(double x) | |||
| { | |||
| int n; | |||
| double a, b, c, epsilon; | |||
| static double A, B, C; | |||
| static int initialized; | |||
| if (x > 0 && DBL_MAX >= x) { | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| A = fs_sqrt(2); | |||
| B = A / 2; | |||
| C = fs_log(A); | |||
| } | |||
| for (n = 0; x > A; x /= 2) { | |||
| ++n; | |||
| } | |||
| while (B > x) { | |||
| --n; | |||
| x *= 2; | |||
| } | |||
| a = (x - 1) / (x + 1); | |||
| x = C * n + a; | |||
| c = a * a; | |||
| n = 1; | |||
| epsilon = DBL_EPSILON * x; | |||
| if (0 > a) { | |||
| if (epsilon > 0) { | |||
| epsilon = -epsilon; | |||
| } | |||
| do { | |||
| n += 2; | |||
| a *= c; | |||
| b = a / n; | |||
| x += b; | |||
| } while (epsilon > b); | |||
| } else { | |||
| if (0 > epsilon) { | |||
| epsilon = -epsilon; | |||
| } | |||
| do { | |||
| n += 2; | |||
| a *= c; | |||
| b = a / n; | |||
| x += b; | |||
| } while (b > epsilon); | |||
| } | |||
| x *= 2; | |||
| } else { | |||
| x = -DBL_MAX; | |||
| } | |||
| return x; | |||
| } | |||
| double fs_log10(double x) | |||
| { | |||
| static double log_10; | |||
| static int initialized; | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| log_10 = fs_log(10); | |||
| } | |||
| return x > 0 && DBL_MAX >= x ? fs_log(x) / log_10 : fs_log(x); | |||
| } | |||
| double fs_exp(double x) | |||
| { | |||
| unsigned n, square; | |||
| double b, e; | |||
| static double x_max, x_min, epsilon; | |||
| static int initialized; | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| x_max = fs_log(DBL_MAX); | |||
| x_min = fs_log(DBL_MIN); | |||
| epsilon = DBL_EPSILON / 4; | |||
| } | |||
| if (x_max >= x && x >= x_min) { | |||
| for (square = 0; x > 1; x /= 2) { | |||
| ++square; | |||
| } | |||
| while (-1 > x) { | |||
| ++square; | |||
| x /= 2; | |||
| } | |||
| e = b = n = 1; | |||
| do { | |||
| b /= n++; | |||
| b *= x; | |||
| e += b; | |||
| b /= n++; | |||
| b *= x; | |||
| e += b; | |||
| } while (b > epsilon); | |||
| while (square-- != 0) { | |||
| e *= e; | |||
| } | |||
| } else { | |||
| e = x > 0 ? DBL_MAX : 0; | |||
| } | |||
| return e; | |||
| } | |||
| double fs_modf(double value, double *iptr) | |||
| { | |||
| double a, b; | |||
| const double c = value; | |||
| if (0 > c) { | |||
| value = -value; | |||
| } | |||
| if (DBL_MAX >= value) { | |||
| for (*iptr = 0; value >= 1; value -= b) { | |||
| a = value / 2; | |||
| b = 1; | |||
| while (a >= b) { | |||
| b *= 2; | |||
| } | |||
| *iptr += b; | |||
| } | |||
| } else { | |||
| *iptr = value; | |||
| value = 0; | |||
| } | |||
| if (0 > c) { | |||
| *iptr = -*iptr; | |||
| value = -value; | |||
| } | |||
| return value; | |||
| } | |||
| double fs_fmod(double x, double y) | |||
| { | |||
| double a, b; | |||
| const double c = x; | |||
| if (0 > c) { | |||
| x = -x; | |||
| } | |||
| if (0 > y) { | |||
| y = -y; | |||
| } | |||
| if (y != 0 && DBL_MAX >= y && DBL_MAX >= x) { | |||
| while (x >= y) { | |||
| a = x / 2; | |||
| b = y; | |||
| while (a >= b) { | |||
| b *= 2; | |||
| } | |||
| x -= b; | |||
| } | |||
| } else { | |||
| x = 0; | |||
| } | |||
| return 0 > c ? -x : x; | |||
| } | |||
| double fs_pow(double x, double y) | |||
| { | |||
| double p = 0; | |||
| if (0 > x && fs_fmod(y, 1) == 0) { | |||
| if (fs_fmod(y, 2) == 0) { | |||
| p = fs_exp(fs_log(-x) * y); | |||
| } else { | |||
| p = -fs_exp(fs_log(-x) * y); | |||
| } | |||
| } else { | |||
| if (x != 0 || 0 >= y) { | |||
| p = fs_exp(fs_log( x) * y); | |||
| } | |||
| } | |||
| return p; | |||
| } | |||
| static double fs_pi(void) | |||
| { | |||
| unsigned n; | |||
| double a, b, epsilon; | |||
| static double p; | |||
| static int initialized; | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| epsilon = DBL_EPSILON / 4; | |||
| n = 1; | |||
| a = 3; | |||
| do { | |||
| a /= 9; | |||
| b = a / n; | |||
| n += 2; | |||
| a /= 9; | |||
| b -= a / n; | |||
| n += 2; | |||
| p += b; | |||
| } while (b > epsilon); | |||
| epsilon = DBL_EPSILON / 2; | |||
| n = 1; | |||
| a = 2; | |||
| do { | |||
| a /= 4; | |||
| b = a / n; | |||
| n += 2; | |||
| a /= 4; | |||
| b -= a / n; | |||
| n += 2; | |||
| p += b; | |||
| } while (b > epsilon); | |||
| p *= 4; | |||
| } | |||
| return p; | |||
| } | |||
| double fs_cos(double x) | |||
| { | |||
| unsigned n; | |||
| int negative, sine; | |||
| double a, b, c; | |||
| static double pi, two_pi, half_pi, third_pi, epsilon; | |||
| static int initialized; | |||
| if (0 > x) { | |||
| x = -x; | |||
| } | |||
| if (DBL_MAX >= x) { | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| pi = fs_pi(); | |||
| two_pi = 2 * pi; | |||
| half_pi = pi / 2; | |||
| third_pi = pi / 3; | |||
| epsilon = DBL_EPSILON / 2; | |||
| } | |||
| if (x > two_pi) { | |||
| x = fs_fmod(x, two_pi); | |||
| } | |||
| if (x > pi) { | |||
| x = two_pi - x; | |||
| } | |||
| if (x > half_pi) { | |||
| x = pi - x; | |||
| negative = 1; | |||
| } else { | |||
| negative = 0; | |||
| } | |||
| if (x > third_pi) { | |||
| x = half_pi - x; | |||
| sine = 1; | |||
| } else { | |||
| sine = 0; | |||
| } | |||
| c = x * x; | |||
| x = n = 0; | |||
| a = 1; | |||
| do { | |||
| b = a; | |||
| a *= c; | |||
| a /= ++n; | |||
| a /= ++n; | |||
| b -= a; | |||
| a *= c; | |||
| a /= ++n; | |||
| a /= ++n; | |||
| x += b; | |||
| } while (b > epsilon); | |||
| if (sine) { | |||
| x = fs_sqrt((1 - x) * (1 + x)); | |||
| } | |||
| if (negative) { | |||
| x = -x; | |||
| } | |||
| } else { | |||
| x = -DBL_MAX; | |||
| } | |||
| return x; | |||
| } | |||
| double fs_log2(double x) | |||
| { | |||
| static double log_2; | |||
| static int initialized; | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| log_2 = fs_log(2); | |||
| } | |||
| return x > 0 && DBL_MAX >= x ? fs_log(x) / log_2 : fs_log(x); | |||
| } | |||
| double fs_exp2(double x) | |||
| { | |||
| static double log_2; | |||
| static int initialized; | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| log_2 = fs_log(2); | |||
| } | |||
| return fs_exp(x * log_2); | |||
| } | |||
| long double fs_powl(long double x, long double y) | |||
| { | |||
| long double p; | |||
| if (0 > x && fs_fmodl(y, 1) == 0) { | |||
| if (fs_fmodl(y, 2) == 0) { | |||
| p = fs_expl(fs_logl(-x) * y); | |||
| } else { | |||
| p = -fs_expl(fs_logl(-x) * y); | |||
| } | |||
| } else { | |||
| if (x != 0 || 0 >= y) { | |||
| p = fs_expl(fs_logl( x) * y); | |||
| } else { | |||
| p = 0; | |||
| } | |||
| } | |||
| return p; | |||
| } | |||
| long double fs_sqrtl(long double x) | |||
| { | |||
| long int n; | |||
| long double a, b; | |||
| if (x > 0 && LDBL_MAX >= x) { | |||
| for (n = 0; x > 2; x /= 4) { | |||
| ++n; | |||
| } | |||
| while (0.5 > x) { | |||
| --n; | |||
| x *= 4; | |||
| } | |||
| a = x; | |||
| b = (1 + x) / 2; | |||
| do { | |||
| x = b; | |||
| b = (a / x + x) / 2; | |||
| } while (x > b); | |||
| while (n > 0) { | |||
| x *= 2; | |||
| --n; | |||
| } | |||
| while (0 > n) { | |||
| x /= 2; | |||
| ++n; | |||
| } | |||
| } else { | |||
| if (x != 0) { | |||
| x = LDBL_MAX; | |||
| } | |||
| } | |||
| return x; | |||
| } | |||
| long double fs_logl(long double x) | |||
| { | |||
| long int n; | |||
| long double a, b, c, epsilon; | |||
| static long double A, B, C; | |||
| static int initialized; | |||
| if (x > 0 && LDBL_MAX >= x) { | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| B = 1.5; | |||
| do { | |||
| A = B; | |||
| B = 1 / A + A / 2; | |||
| } while (A > B); | |||
| B /= 2; | |||
| C = fs_logl(A); | |||
| } | |||
| for (n = 0; x > A; x /= 2) { | |||
| ++n; | |||
| } | |||
| while (B > x) { | |||
| --n; | |||
| x *= 2; | |||
| } | |||
| a = (x - 1) / (x + 1); | |||
| x = C * n + a; | |||
| c = a * a; | |||
| n = 1; | |||
| epsilon = LDBL_EPSILON * x; | |||
| if (0 > a) { | |||
| if (epsilon > 0) { | |||
| epsilon = -epsilon; | |||
| } | |||
| do { | |||
| n += 2; | |||
| a *= c; | |||
| b = a / n; | |||
| x += b; | |||
| } while (epsilon > b); | |||
| } else { | |||
| if (0 > epsilon) { | |||
| epsilon = -epsilon; | |||
| } | |||
| do { | |||
| n += 2; | |||
| a *= c; | |||
| b = a / n; | |||
| x += b; | |||
| } while (b > epsilon); | |||
| } | |||
| x *= 2; | |||
| } else { | |||
| x = -LDBL_MAX; | |||
| } | |||
| return x; | |||
| } | |||
| long double fs_expl(long double x) | |||
| { | |||
| long unsigned n, square; | |||
| long double b, e; | |||
| static long double x_max, x_min, epsilon; | |||
| static int initialized; | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| x_max = fs_logl(LDBL_MAX); | |||
| x_min = fs_logl(LDBL_MIN); | |||
| epsilon = LDBL_EPSILON / 4; | |||
| } | |||
| if (x_max >= x && x >= x_min) { | |||
| for (square = 0; x > 1; x /= 2) { | |||
| ++square; | |||
| } | |||
| while (-1 > x) { | |||
| ++square; | |||
| x /= 2; | |||
| } | |||
| e = b = n = 1; | |||
| do { | |||
| b /= n++; | |||
| b *= x; | |||
| e += b; | |||
| b /= n++; | |||
| b *= x; | |||
| e += b; | |||
| } while (b > epsilon); | |||
| while (square-- != 0) { | |||
| e *= e; | |||
| } | |||
| } else { | |||
| e = x > 0 ? LDBL_MAX : 0; | |||
| } | |||
| return e; | |||
| } | |||
| static long double fs_pil(void) | |||
| { | |||
| long unsigned n; | |||
| long double a, b, epsilon; | |||
| static long double p; | |||
| static int initialized; | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| epsilon = LDBL_EPSILON / 4; | |||
| n = 1; | |||
| a = 3; | |||
| do { | |||
| a /= 9; | |||
| b = a / n; | |||
| n += 2; | |||
| a /= 9; | |||
| b -= a / n; | |||
| n += 2; | |||
| p += b; | |||
| } while (b > epsilon); | |||
| epsilon = LDBL_EPSILON / 2; | |||
| n = 1; | |||
| a = 2; | |||
| do { | |||
| a /= 4; | |||
| b = a / n; | |||
| n += 2; | |||
| a /= 4; | |||
| b -= a / n; | |||
| n += 2; | |||
| p += b; | |||
| } while (b > epsilon); | |||
| p *= 4; | |||
| } | |||
| return p; | |||
| } | |||
| long double fs_cosl(long double x) | |||
| { | |||
| long unsigned n; | |||
| int negative, sine; | |||
| long double a, b, c; | |||
| static long double pi, two_pi, half_pi, third_pi, epsilon; | |||
| static int initialized; | |||
| if (0 > x) { | |||
| x = -x; | |||
| } | |||
| if (LDBL_MAX >= x) { | |||
| if (!initialized) { | |||
| initialized = 1; | |||
| pi = fs_pil(); | |||
| two_pi = 2 * pi; | |||
| half_pi = pi / 2; | |||
| third_pi = pi / 3; | |||
| epsilon = LDBL_EPSILON / 2; | |||
| } | |||
| if (x > two_pi) { | |||
| x = fs_fmodl(x, two_pi); | |||
| } | |||
| if (x > pi) { | |||
| x = two_pi - x; | |||
| } | |||
| if (x > half_pi) { | |||
| x = pi - x; | |||
| negative = 1; | |||
| } else { | |||
| negative = 0; | |||
| } | |||
| if (x > third_pi) { | |||
| x = half_pi - x; | |||
| sine = 1; | |||
| } else { | |||
| sine = 0; | |||
| } | |||
| c = x * x; | |||
| x = n = 0; | |||
| a = 1; | |||
| do { | |||
| b = a; | |||
| a *= c; | |||
| a /= ++n; | |||
| a /= ++n; | |||
| b -= a; | |||
| a *= c; | |||
| a /= ++n; | |||
| a /= ++n; | |||
| x += b; | |||
| } while (b > epsilon); | |||
| if (sine) { | |||
| x = fs_sqrtl((1 - x) * (1 + x)); | |||
| } | |||
| if (negative) { | |||
| x = -x; | |||
| } | |||
| } else { | |||
| x = -LDBL_MAX; | |||
| } | |||
| return x; | |||
| } | |||
| long double fs_fmodl(long double x, long double y) | |||
| { | |||
| long double a, b; | |||
| const long double c = x; | |||
| if (0 > c) { | |||
| x = -x; | |||
| } | |||
| if (0 > y) { | |||
| y = -y; | |||
| } | |||
| if (y != 0 && LDBL_MAX >= y && LDBL_MAX >= x) { | |||
| while (x >= y) { | |||
| a = x / 2; | |||
| b = y; | |||
| while (a >= b) { | |||
| b *= 2; | |||
| } | |||
| x -= b; | |||
| } | |||
| } else { | |||
| x = 0; | |||
| } | |||
| return 0 > c ? -x : x; | |||
| } | |||
| /* END fs_math.c */ | |||
+ 116
- 0
code/espurna/libs/fs_math.h
View File
| @ -0,0 +1,116 @@ | |||
| /** | |||
| * This code is available at | |||
| * http://www.mindspring.com/~pfilandr/C/fs_math/ | |||
| * and it is believed to be public domain. | |||
| */ | |||
| /* BEGIN fs_math.h */ | |||
| /* | |||
| ** Portable freestanding code. | |||
| */ | |||
| #ifndef H_FS_MATH_H | |||
| #define H_FS_MATH_H | |||
| double fs_sqrt(double x); | |||
| double fs_log(double x); | |||
| double fs_log10(double x); | |||
| /* | |||
| ** exp(x) = 1 + x + x^2/2! + x^3/3! + ... | |||
| */ | |||
| double fs_exp(double x); | |||
| double fs_modf(double value, double *iptr); | |||
| double fs_fmod(double x, double y); | |||
| double fs_pow(double x, double y); | |||
| double fs_cos(double x); | |||
| /* | |||
| ** C99 | |||
| */ | |||
| double fs_log2(double x); | |||
| double fs_exp2(double x); | |||
| long double fs_powl(long double x, long double y); | |||
| long double fs_sqrtl(long double x); | |||
| long double fs_logl(long double x); | |||
| long double fs_expl(long double x); | |||
| long double fs_cosl(long double x); | |||
| long double fs_fmodl(long double x, long double y); | |||
| #endif | |||
| /* END fs_math.h */ | |||
| #if 0 | |||
| /* | |||
| > > Anybody know where I can get some source code for a | |||
| > > reasonably fast double | |||
| > > precision square root algorithm in C. | |||
| > > I'm looking for one that is not IEEE | |||
| > > compliant as I am running on a Z/OS mainframe. | |||
| > > | |||
| > > I would love to use the standard library but | |||
| > > unfortunatly I'm using a | |||
| > > stripped down version of C that looses the the runtime library | |||
| > > (we have to write our own). | |||
| > | |||
| > long double Ssqrt(long double x) | |||
| > { | |||
| > long double a, b; | |||
| > size_t c; | |||
| size_t is a bug here. | |||
| c needs to be a signed type: | |||
| long c; | |||
| > if (x > 0) { | |||
| > c = 0; | |||
| > while (x > 4) { | |||
| > x /= 4; | |||
| > ++c; | |||
| > } | |||
| > while (1.0 / 4 > x) { | |||
| > x *= 4; | |||
| > --c; | |||
| > } | |||
| > a = x; | |||
| > b = ((4 > a) + a) / 2; | |||
| Not a bug, but should be: | |||
| b = (1 + a) / 2; | |||
| > do { | |||
| > x = b; | |||
| > b = (a / x + x) / 2; | |||
| > } while (x > b); | |||
| > if (c > 0) { | |||
| The above line is why c needs to be a signed type, | |||
| otherwise the decremented values of c, are greater than zero, | |||
| and the function won't work if the initial value of x | |||
| is less than 0.25 | |||
| > while (c--) { | |||
| > x *= 2; | |||
| > } | |||
| > } else { | |||
| > while (c++) { | |||
| > x /= 2; | |||
| > } | |||
| > } | |||
| > } | |||
| > return x; | |||
| > } | |||
| > | |||
| > > | |||
| > > That algorithm was actually 4 times slower | |||
| > > then the one below, and more | |||
| > > code. It was accurate though. | |||
| > > | |||
| > | |||
| > Sorry Pete, I wasn't looking very carefully. | |||
| > When I converted your function | |||
| > to double precision it's was much quicker, the best I've seen yet. | |||
| */ | |||
| #endif | |||
code/espurna/pwm.c → code/espurna/libs/pwm.c
View File
+ 13
- 23
code/espurna/light.ino
View File
+ 12
- 10
code/espurna/mqtt.ino
View File
+ 11
- 1
code/espurna/ota.ino
View File
+ 97
- 41
code/espurna/relay.ino
View File
+ 33
- 9
code/espurna/rfbridge.ino
View File
+ 13
- 1
code/espurna/sensor.ino
View File
+ 15
- 8
code/espurna/sensors/EmonSensor.h
View File
+ 298
- 0
code/espurna/sensors/GeigerSensor.h
View File
| @ -0,0 +1,298 @@ | |||
| // ----------------------------------------------------------------------------- | |||
| // Geiger Sensor based on Event Counter Sensor | |||
| // Copyright (C) 2018 by Sven Kopetzki <skopetzki at web dot de> | |||
| // Documentation: https://github.com/Trickx/espurna/wiki/Geiger-counter | |||
| // ----------------------------------------------------------------------------- | |||
| #if SENSOR_SUPPORT && GEIGER_SUPPORT | |||
| #pragma once | |||
| #include "Arduino.h" | |||
| #include "BaseSensor.h" | |||
| class GeigerSensor : public BaseSensor { | |||
| public: | |||
| // --------------------------------------------------------------------- | |||
| // Public | |||
| // --------------------------------------------------------------------- | |||
| GeigerSensor() : BaseSensor() { | |||
| _count = 2; | |||
| _sensor_id = SENSOR_GEIGER_ID; | |||
| } | |||
| ~GeigerSensor() { | |||
| _enableInterrupts(false); | |||
| } | |||
| // --------------------------------------------------------------------- | |||
| void setGPIO(unsigned char gpio) { | |||
| _gpio = gpio; | |||
| } | |||
| void setMode(unsigned char mode) { | |||
| _mode = mode; | |||
| } | |||
| void setInterruptMode(unsigned char mode) { | |||
| _interrupt_mode = mode; | |||
| } | |||
| void setDebounceTime(unsigned long debounce) { | |||
| _debounce = debounce; | |||
| } | |||
| void setCPM2SievertFactor(unsigned int cpm2sievert) { | |||
| _cpm2sievert = cpm2sievert; | |||
| } | |||
| // --------------------------------------------------------------------- | |||
| unsigned char getGPIO() { | |||
| return _gpio; | |||
| } | |||
| unsigned char getMode() { | |||
| return _mode; | |||
| } | |||
| unsigned char getInterruptMode() { | |||
| return _interrupt_mode; | |||
| } | |||
| unsigned long getDebounceTime() { | |||
| return _debounce; | |||
| } | |||
| unsigned long getCPM2SievertFactor() { | |||
| return _cpm2sievert; | |||
| } | |||
| // --------------------------------------------------------------------- | |||
| // Sensors API | |||
| // --------------------------------------------------------------------- | |||
| // Initialization method, must be idempotent | |||
| // Defined outside the class body | |||
| void begin() { | |||
| pinMode(_gpio, _mode); | |||
| _enableInterrupts(true); | |||
| _ready = true; | |||
| } | |||
| // Descriptive name of the sensor | |||
| String description() { | |||
| char buffer[20]; | |||
| snprintf(buffer, sizeof(buffer), "µSv/h @ GPIO%d", _gpio); | |||
| return String(buffer); | |||
| } | |||
| // Descriptive name of the slot # index | |||
| String slot(unsigned char index) { | |||
| char buffer[30]; | |||
| unsigned char i=0; | |||
| #if GEIGER_REPORT_CPM | |||
| if (index == i++) { | |||
| snprintf(buffer, sizeof(buffer), "Counts per Minute @ GPIO%d", _gpio); | |||
| return String(buffer); | |||
| } | |||
| #endif | |||
| #if GEIGER_REPORT_SIEVERTS | |||
| if (index == i++) { | |||
| snprintf(buffer, sizeof(buffer), "CPM / %d = µSv/h", _cpm2sievert); | |||
| return String(buffer); | |||
| } | |||
| #endif | |||
| snprintf(buffer, sizeof(buffer), "Events @ GPIO%d", _gpio); | |||
| return String(buffer); | |||
| }; | |||
| // Address of the sensor (it could be the GPIO or I2C address) | |||
| String address(unsigned char index) { | |||
| return String(_gpio); | |||
| } | |||
| // Type for slot # index | |||
| unsigned char type(unsigned char index) { | |||
| unsigned char i=0; | |||
| #if GEIGER_REPORT_CPM | |||
| if (index == i++) return MAGNITUDE_GEIGER_CPM; | |||
| #endif | |||
| #if GEIGER_REPORT_SIEVERTS | |||
| if (index == i++) return MAGNITUDE_GEIGER_SIEVERT; | |||
| #endif | |||
| return MAGNITUDE_NONE; | |||
| } | |||
| // Current value for slot # index | |||
| double value(unsigned char index) { | |||
| unsigned char i=0; | |||
| #if GEIGER_REPORT_CPM | |||
| if (index == i++) { | |||
| unsigned long _period_begin = _lastreport_cpm; | |||
| _lastreport_cpm = millis(); | |||
| double value = _events * 60000; | |||
| value = value / (_lastreport_cpm-_period_begin); | |||
| #if SENSOR_DEBUG | |||
| char data[128]; char buffer[10]; | |||
| dtostrf(value, 1-sizeof(buffer), 4, buffer); | |||
| snprintf(data, sizeof(data), "Ticks: %u | Interval: %u | CPM: %s", _ticks, (_lastreport_cpm-_period_begin), buffer); | |||
| DEBUG_MSG("[GEIGER] %s\n", data); | |||
| #endif | |||
| _events = 0; | |||
| return value; | |||
| } | |||
| #endif | |||
| #if GEIGER_REPORT_SIEVERTS | |||
| if (index == i++) { | |||
| unsigned long _period_begin = _lastreport_sv; | |||
| _lastreport_sv = millis(); | |||
| double value = _ticks * 60000 / _cpm2sievert; | |||
| value = value / (_lastreport_sv-_period_begin); | |||
| #if SENSOR_DEBUG | |||
| char data[128]; char buffer[10]; | |||
| dtostrf(value, 1-sizeof(buffer), 4, buffer); | |||
| snprintf(data, sizeof(data), "Ticks: %u | Interval: %u | µSievert: %s", _ticks, (_lastreport_sv-_period_begin), buffer); | |||
| DEBUG_MSG("[GEIGER] %s\n", data); | |||
| #endif | |||
| _ticks = 0; | |||
| return value; | |||
| } | |||
| #endif | |||
| return 0; | |||
| } | |||
| // Handle interrupt calls | |||
| void handleInterrupt(unsigned char gpio) { | |||
| (void) gpio; | |||
| static unsigned long last = 0; | |||
| if (millis() - last > _debounce) { | |||
| _events = _events + 1; | |||
| _ticks = _ticks + 1; | |||
| last = millis(); | |||
| } | |||
| } | |||
| protected: | |||
| // --------------------------------------------------------------------- | |||
| // Interrupt management | |||
| // --------------------------------------------------------------------- | |||
| void _attach(GeigerSensor * instance, unsigned char gpio, unsigned char mode); | |||
| void _detach(unsigned char gpio); | |||
| void _enableInterrupts(bool value) { | |||
| static unsigned char _interrupt_gpio = GPIO_NONE; | |||
| if (value) { | |||
| if (_interrupt_gpio != GPIO_NONE) _detach(_interrupt_gpio); | |||
| _attach(this, _gpio, _interrupt_mode); | |||
| _interrupt_gpio = _gpio; | |||
| } else if (_interrupt_gpio != GPIO_NONE) { | |||
| _detach(_interrupt_gpio); | |||
| _interrupt_gpio = GPIO_NONE; | |||
| } | |||
| } | |||
| // --------------------------------------------------------------------- | |||
| // Protected | |||
| // --------------------------------------------------------------------- | |||
| volatile unsigned long _events = 0; | |||
| volatile unsigned long _ticks = 0; | |||
| unsigned long _debounce = GEIGER_DEBOUNCE; | |||
| unsigned int _cpm2sievert = GEIGER_CPM2SIEVERT; | |||
| unsigned char _gpio; | |||
| unsigned char _mode; | |||
| unsigned char _interrupt_mode; | |||
| // Added for µSievert calculations | |||
| unsigned long _lastreport_cpm = millis(); | |||
| unsigned long _lastreport_sv = _lastreport_cpm; | |||
| }; | |||
| // ----------------------------------------------------------------------------- | |||
| // Interrupt helpers | |||
| // ----------------------------------------------------------------------------- | |||
| GeigerSensor * _geiger_sensor_instance[10] = {NULL}; | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr(unsigned char gpio) { | |||
| unsigned char index = gpio > 5 ? gpio-6 : gpio; | |||
| if (_geiger_sensor_instance[index]) { | |||
| _geiger_sensor_instance[index]->handleInterrupt(gpio); | |||
| } | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_0() { | |||
| _geiger_sensor_isr(0); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_1() { | |||
| _geiger_sensor_isr(1); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_2() { | |||
| _geiger_sensor_isr(2); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_3() { | |||
| _geiger_sensor_isr(3); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_4() { | |||
| _geiger_sensor_isr(4); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_5() { | |||
| _geiger_sensor_isr(5); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_12() { | |||
| _geiger_sensor_isr(12); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_13() { | |||
| _geiger_sensor_isr(13); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_14() { | |||
| _geiger_sensor_isr(14); | |||
| } | |||
| void ICACHE_RAM_ATTR _geiger_sensor_isr_15() { | |||
| _geiger_sensor_isr(15); | |||
| } | |||
| static void (*_geiger_sensor_isr_list[10])() = { | |||
| _geiger_sensor_isr_0, _geiger_sensor_isr_1, _geiger_sensor_isr_2, | |||
| _geiger_sensor_isr_3, _geiger_sensor_isr_4, _geiger_sensor_isr_5, | |||
| _geiger_sensor_isr_12, _geiger_sensor_isr_13, _geiger_sensor_isr_14, | |||
| _geiger_sensor_isr_15 | |||
| }; | |||
| void GeigerSensor::_attach(GeigerSensor * instance, unsigned char gpio, unsigned char mode) { | |||
| if (!gpioValid(gpio)) return; | |||
| _detach(gpio); | |||
| unsigned char index = gpio > 5 ? gpio-6 : gpio; | |||
| _geiger_sensor_instance[index] = instance; | |||
| attachInterrupt(gpio, _geiger_sensor_isr_list[index], mode); | |||
| #if SENSOR_DEBUG | |||
| DEBUG_MSG_P(PSTR("[GEIGER] GPIO%d interrupt attached to %s\n"), gpio, instance->description().c_str()); | |||
| #endif | |||
| } | |||
| void GeigerSensor::_detach(unsigned char gpio) { | |||
| if (!gpioValid(gpio)) return; | |||
| unsigned char index = gpio > 5 ? gpio-6 : gpio; | |||
| if (_geiger_sensor_instance[index]) { | |||
| detachInterrupt(gpio); | |||
| #if SENSOR_DEBUG | |||
| DEBUG_MSG_P(PSTR("[GEIGER] GPIO%d interrupt detached from %s\n"), gpio, _geiger_sensor_instance[index]->description().c_str()); | |||
| #endif | |||
| _geiger_sensor_instance[index] = NULL; | |||
| } | |||
| } | |||
| #endif // SENSOR_SUPPORT && GEIGER_SUPPORT | |||
+ 4
- 1
code/espurna/sensors/V9261FSensor.h
View File
+ 42
- 36
code/espurna/settings.ino
View File
+ 2307
- 1356
code/espurna/static/index.html.gz.h
File diff suppressed because it is too large
View File
+ 4
- 6
code/espurna/system.ino
View File
+ 1
- 1
code/espurna/telnet.ino
View File
+ 77
- 174
code/espurna/utils.ino
View File
+ 24
- 5
code/espurna/web.ino
View File
+ 214
- 52
code/espurna/wifi.ino
View File
+ 2
- 0
code/espurna/ws.ino
View File
+ 11
- 5
code/html/custom.js
View File
+ 1
- 1
code/html/index.html
View File
+ 177
- 163
code/platformio.ini
File diff suppressed because it is too large
View File
+ 57
- 0
code/symbols.sh
View File
| @ -0,0 +1,57 @@ | |||
| #!/bin/bash | |||
| # ------------------------------------------------------------------------------ | |||
| # CONFIGURATION | |||
| # ------------------------------------------------------------------------------ | |||
| ENVIRONMENT="wemos-d1mini-relayshield" | |||
| READELF="xtensa-lx106-elf-readelf" | |||
| NUMBER=20 | |||
| # ------------------------------------------------------------------------------ | |||
| # END CONFIGURATION - DO NOT EDIT FURTHER | |||
| # ------------------------------------------------------------------------------ | |||
| # remove default trace file | |||
| rm -rf $FILE | |||
| function help { | |||
| echo | |||
| echo "Syntax: $0 [-e <environment>] [-n <number>]" | |||
| echo | |||
| } | |||
| # get environment from command line | |||
| while [[ $# -gt 1 ]]; do | |||
| key="$1" | |||
| case $key in | |||
| -e) | |||
| ENVIRONMENT="$2" | |||
| shift | |||
| ;; | |||
| -n) | |||
| NUMBER="$2" | |||
| shift | |||
| ;; | |||
| esac | |||
| shift # past argument or value | |||
| done | |||
| # check environment folder | |||
| if [ $ENVIRONMENT == "" ]; then | |||
| echo "No environment defined" | |||
| help | |||
| exit 1 | |||
| fi | |||
| ELF=.pioenvs/$ENVIRONMENT/firmware.elf | |||
| if [ ! -f $ELF ]; then | |||
| echo "Could not find ELF file for the selected environment: $ELF" | |||
| exit 2 | |||
| fi | |||
| $READELF -s $ELF | head -3 | tail -1 | |||
| $READELF -s $ELF | sort -r -k3 -n | head -$NUMBER | |||
BIN
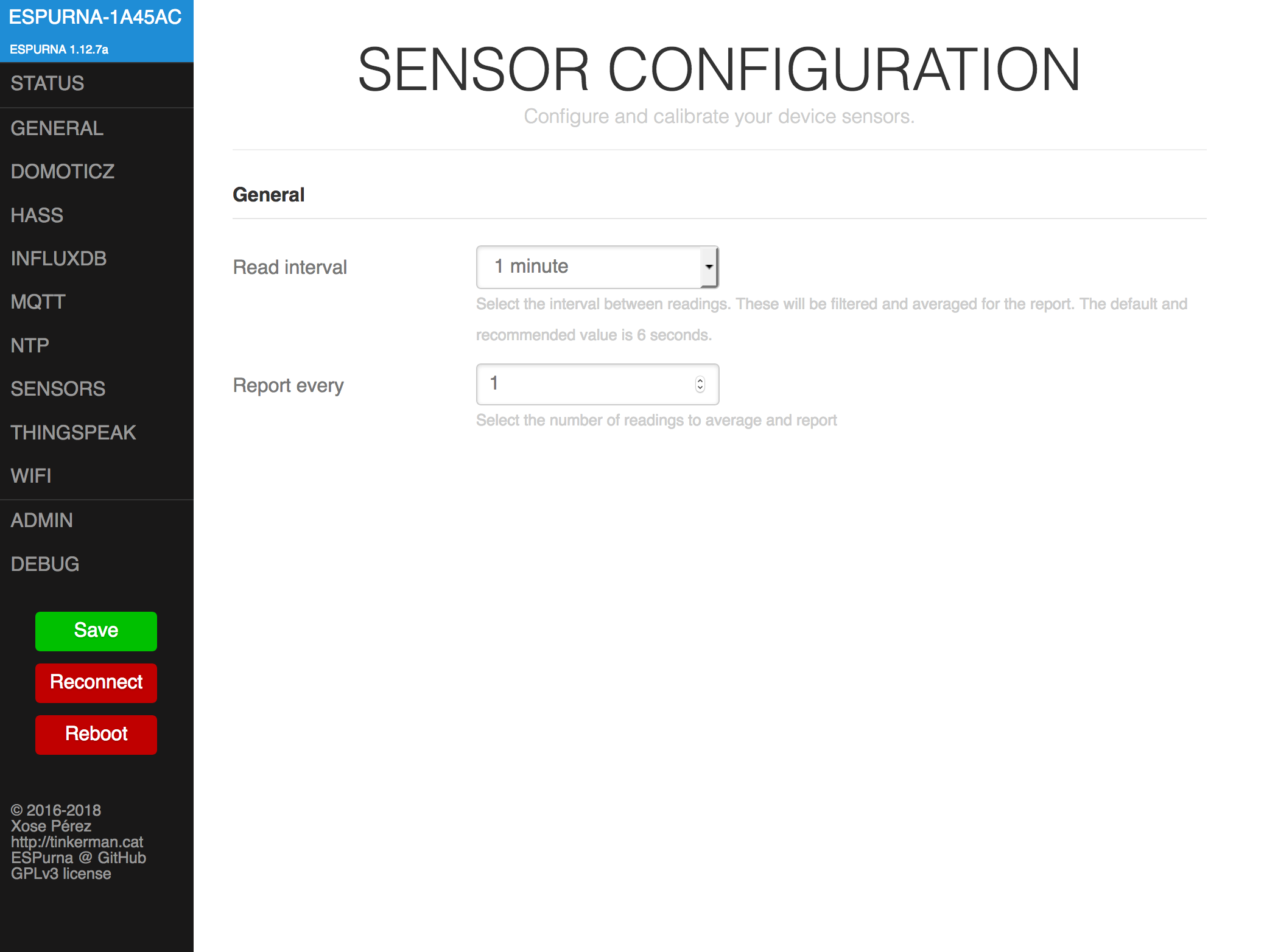
images/devices/geiger_espurna_configuration.png
View File
{kind=link}
| Before | After |
|---|---|
|
|
| Width: 2076 | Height: 1564 | Size: 247 KiB |
BIN
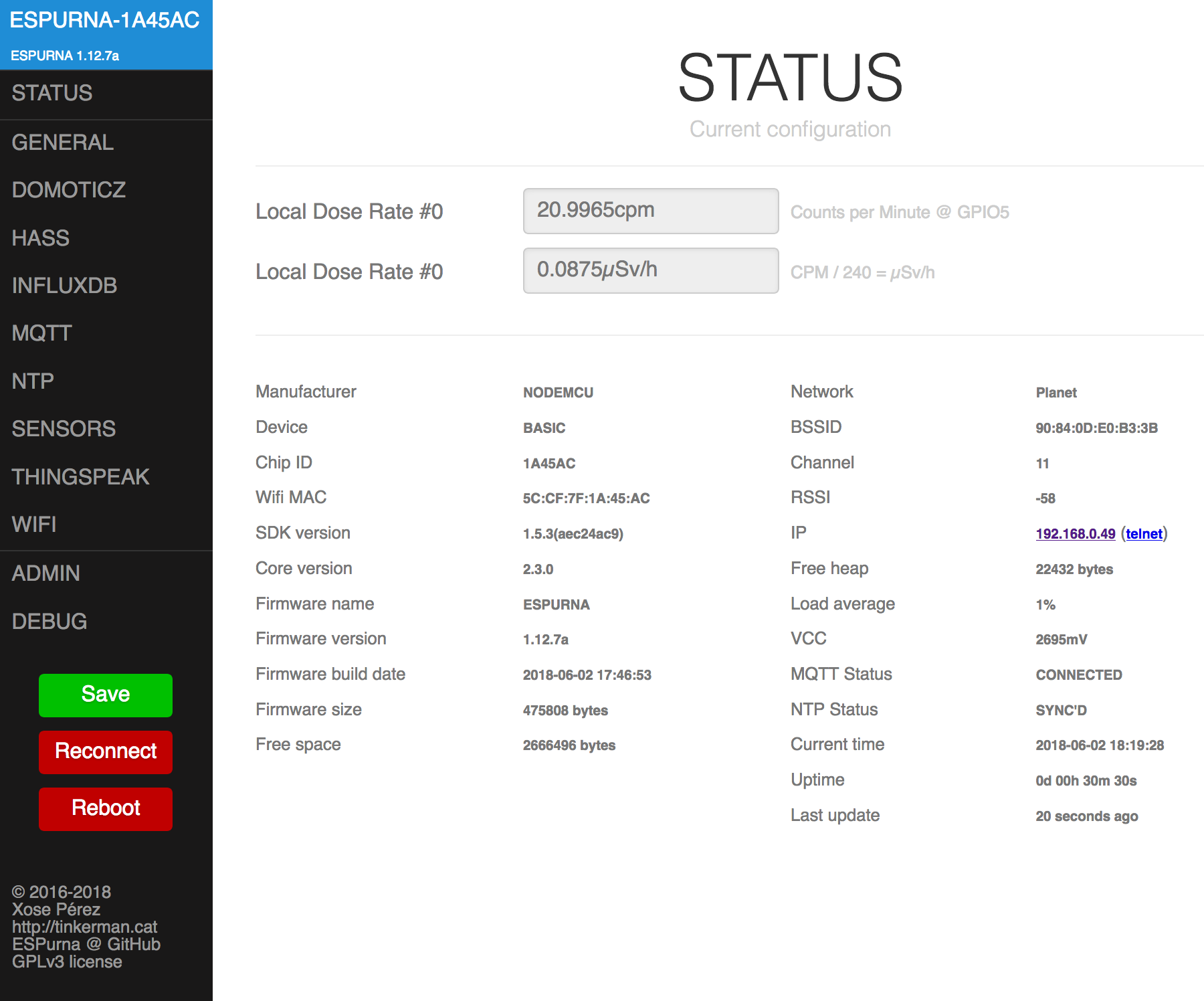
images/devices/geiger_espurna_status.png
View File
{kind=link}
| Before | After |
|---|---|
|
|
| Width: 1800 | Height: 1496 | Size: 325 KiB |
BIN
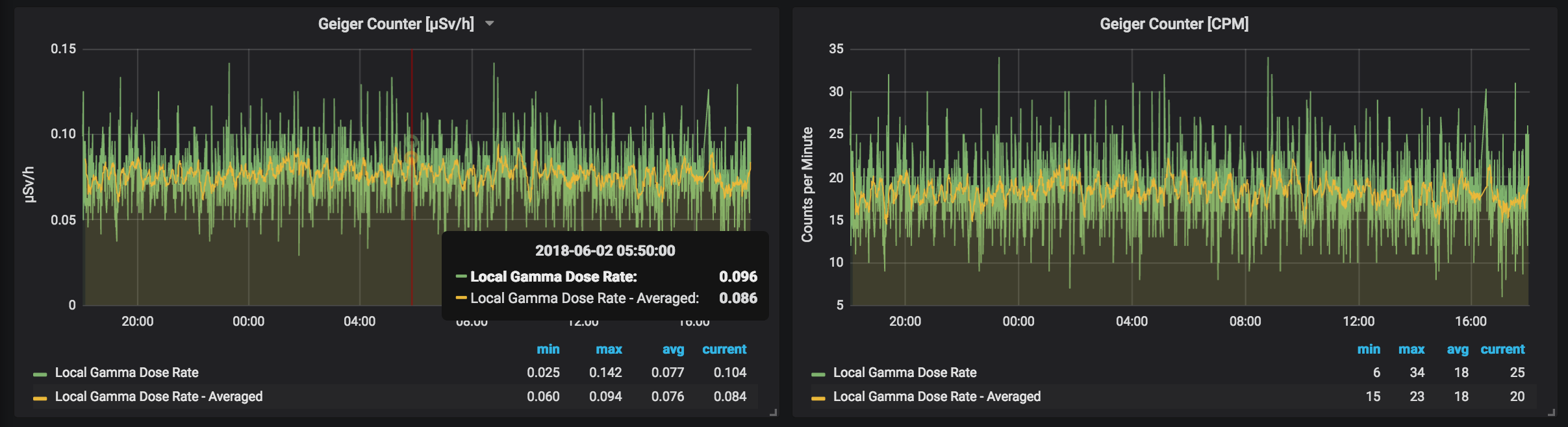
images/devices/geiger_grafana_dashboard.png
View File
{kind=link}
| Before | After |
|---|---|
|
|
| Width: 2414 | Height: 658 | Size: 457 KiB |
BIN
images/devices/geiger_scope_following_pulses.png
View File
{kind=link}
| Before | After |
|---|---|

|
|
| Width: 800 | Height: 480 | Size: 39 KiB |
BIN
images/devices/geiger_scope_single_pulse.png
View File
{kind=link}
| Before | After |
|---|---|

|
|
| Width: 800 | Height: 480 | Size: 38 KiB |
BIN
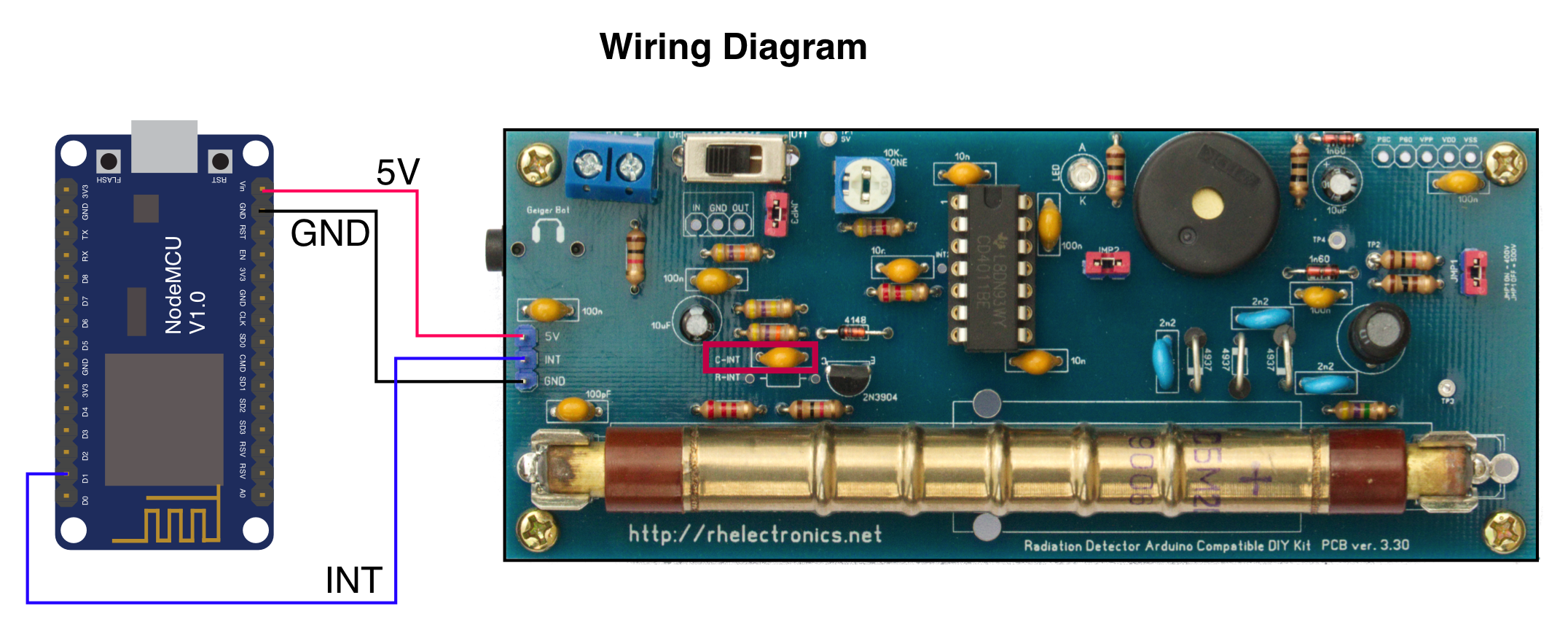
images/devices/geiger_wiring_diagram.png
View File
{kind=link}
| Before | After |
|---|---|
|
|
| Width: 2152 | Height: 864 | Size: 1.9 MiB |