|
|
|
@ -0,0 +1,298 @@ |
|
|
|
// ----------------------------------------------------------------------------- |
|
|
|
// Geiger Sensor based on Event Counter Sensor |
|
|
|
// Copyright (C) 2018 by Sven Kopetzki <skopetzki at web dot de> |
|
|
|
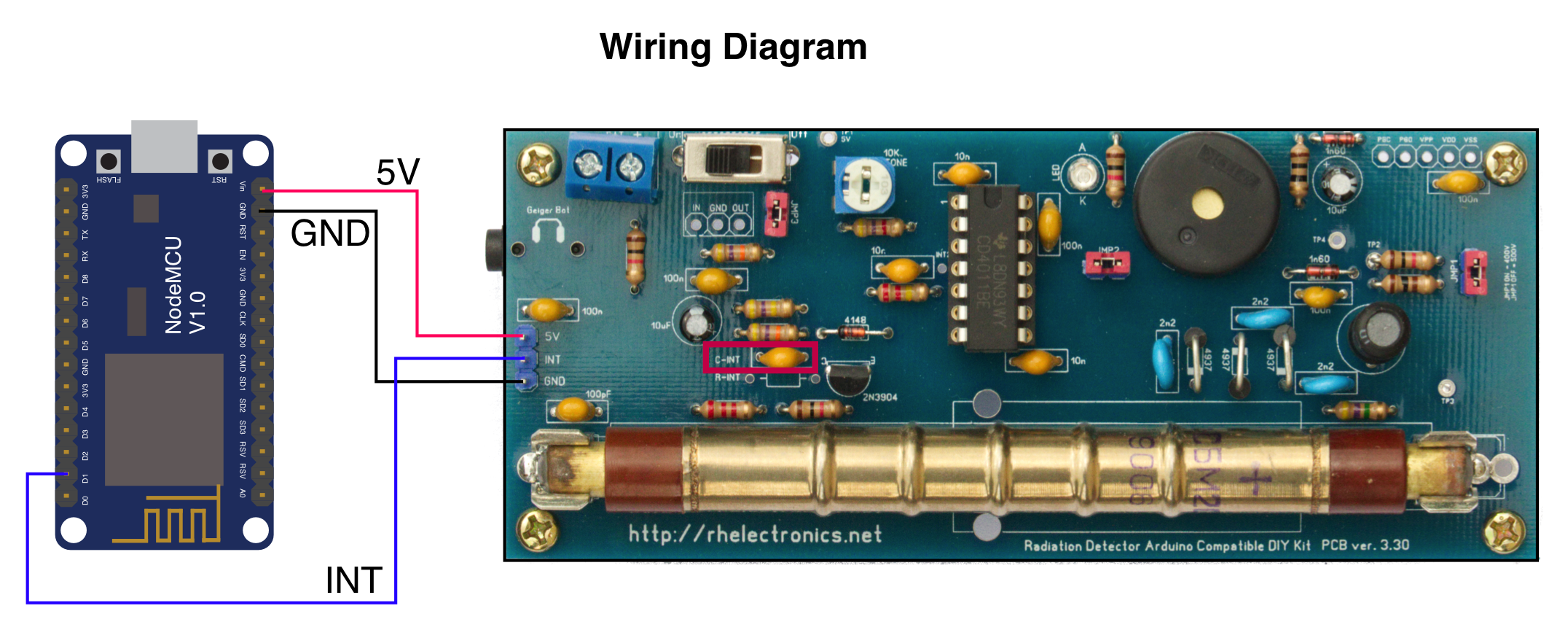
// Documentation: https://github.com/Trickx/espurna/wiki/Geiger-counter |
|
|
|
// ----------------------------------------------------------------------------- |
|
|
|
|
|
|
|
#if SENSOR_SUPPORT && GEIGER_SUPPORT |
|
|
|
|
|
|
|
#pragma once |
|
|
|
|
|
|
|
#include "Arduino.h" |
|
|
|
#include "BaseSensor.h" |
|
|
|
|
|
|
|
class GeigerSensor : public BaseSensor { |
|
|
|
|
|
|
|
public: |
|
|
|
|
|
|
|
// --------------------------------------------------------------------- |
|
|
|
// Public |
|
|
|
// --------------------------------------------------------------------- |
|
|
|
|
|
|
|
GeigerSensor() : BaseSensor() { |
|
|
|
_count = 2; |
|
|
|
_sensor_id = SENSOR_GEIGER_ID; |
|
|
|
} |
|
|
|
|
|
|
|
~GeigerSensor() { |
|
|
|
_enableInterrupts(false); |
|
|
|
} |
|
|
|
|
|
|
|
// --------------------------------------------------------------------- |
|
|
|
|
|
|
|
void setGPIO(unsigned char gpio) { |
|
|
|
_gpio = gpio; |
|
|
|
} |
|
|
|
|
|
|
|
void setMode(unsigned char mode) { |
|
|
|
_mode = mode; |
|
|
|
} |
|
|
|
|
|
|
|
void setInterruptMode(unsigned char mode) { |
|
|
|
_interrupt_mode = mode; |
|
|
|
} |
|
|
|
|
|
|
|
void setDebounceTime(unsigned long debounce) { |
|
|
|
_debounce = debounce; |
|
|
|
} |
|
|
|
|
|
|
|
void setCPM2SievertFactor(unsigned int cpm2sievert) { |
|
|
|
_cpm2sievert = cpm2sievert; |
|
|
|
} |
|
|
|
|
|
|
|
// --------------------------------------------------------------------- |
|
|
|
|
|
|
|
unsigned char getGPIO() { |
|
|
|
return _gpio; |
|
|
|
} |
|
|
|
|
|
|
|
unsigned char getMode() { |
|
|
|
return _mode; |
|
|
|
} |
|
|
|
|
|
|
|
unsigned char getInterruptMode() { |
|
|
|
return _interrupt_mode; |
|
|
|
} |
|
|
|
|
|
|
|
unsigned long getDebounceTime() { |
|
|
|
return _debounce; |
|
|
|
} |
|
|
|
|
|
|
|
unsigned long getCPM2SievertFactor() { |
|
|
|
return _cpm2sievert; |
|
|
|
} |
|
|
|
|
|
|
|
// --------------------------------------------------------------------- |
|
|
|
// Sensors API |
|
|
|
// --------------------------------------------------------------------- |
|
|
|
|
|
|
|
// Initialization method, must be idempotent |
|
|
|
// Defined outside the class body |
|
|
|
void begin() { |
|
|
|
pinMode(_gpio, _mode); |
|
|
|
_enableInterrupts(true); |
|
|
|
_ready = true; |
|
|
|
} |
|
|
|
|
|
|
|
// Descriptive name of the sensor |
|
|
|
String description() { |
|
|
|
char buffer[20]; |
|
|
|
snprintf(buffer, sizeof(buffer), "µSv/h @ GPIO%d", _gpio); |
|
|
|
return String(buffer); |
|
|
|
} |
|
|
|
|
|
|
|
// Descriptive name of the slot # index |
|
|
|
String slot(unsigned char index) { |
|
|
|
char buffer[30]; |
|
|
|
unsigned char i=0; |
|
|
|
#if GEIGER_REPORT_CPM |
|
|
|
if (index == i++) { |
|
|
|
snprintf(buffer, sizeof(buffer), "Counts per Minute @ GPIO%d", _gpio); |
|
|
|
return String(buffer); |
|
|
|
} |
|
|
|
#endif |
|
|
|
#if GEIGER_REPORT_SIEVERTS |
|
|
|
if (index == i++) { |
|
|
|
snprintf(buffer, sizeof(buffer), "CPM / %d = µSv/h", _cpm2sievert); |
|
|
|
return String(buffer); |
|
|
|
} |
|
|
|
#endif |
|
|
|
snprintf(buffer, sizeof(buffer), "Events @ GPIO%d", _gpio); |
|
|
|
return String(buffer); |
|
|
|
}; |
|
|
|
|
|
|
|
// Address of the sensor (it could be the GPIO or I2C address) |
|
|
|
String address(unsigned char index) { |
|
|
|
return String(_gpio); |
|
|
|
} |
|
|
|
|
|
|
|
// Type for slot # index |
|
|
|
unsigned char type(unsigned char index) { |
|
|
|
unsigned char i=0; |
|
|
|
#if GEIGER_REPORT_CPM |
|
|
|
if (index == i++) return MAGNITUDE_GEIGER_CPM; |
|
|
|
#endif |
|
|
|
#if GEIGER_REPORT_SIEVERTS |
|
|
|
if (index == i++) return MAGNITUDE_GEIGER_SIEVERT; |
|
|
|
#endif |
|
|
|
return MAGNITUDE_NONE; |
|
|
|
} |
|
|
|
|
|
|
|
// Current value for slot # index |
|
|
|
double value(unsigned char index) { |
|
|
|
unsigned char i=0; |
|
|
|
#if GEIGER_REPORT_CPM |
|
|
|
if (index == i++) { |
|
|
|
unsigned long _period_begin = _lastreport_cpm; |
|
|
|
_lastreport_cpm = millis(); |
|
|
|
double value = _events * 60000; |
|
|
|
value = value / (_lastreport_cpm-_period_begin); |
|
|
|
#if SENSOR_DEBUG |
|
|
|
char data[128]; char buffer[10]; |
|
|
|
dtostrf(value, 1-sizeof(buffer), 4, buffer); |
|
|
|
snprintf(data, sizeof(data), "Ticks: %u | Interval: %u | CPM: %s", _ticks, (_lastreport_cpm-_period_begin), buffer); |
|
|
|
DEBUG_MSG("[GEIGER] %s\n", data); |
|
|
|
#endif |
|
|
|
_events = 0; |
|
|
|
return value; |
|
|
|
} |
|
|
|
#endif |
|
|
|
#if GEIGER_REPORT_SIEVERTS |
|
|
|
if (index == i++) { |
|
|
|
unsigned long _period_begin = _lastreport_sv; |
|
|
|
_lastreport_sv = millis(); |
|
|
|
double value = _ticks * 60000 / _cpm2sievert; |
|
|
|
value = value / (_lastreport_sv-_period_begin); |
|
|
|
#if SENSOR_DEBUG |
|
|
|
char data[128]; char buffer[10]; |
|
|
|
dtostrf(value, 1-sizeof(buffer), 4, buffer); |
|
|
|
snprintf(data, sizeof(data), "Ticks: %u | Interval: %u | µSievert: %s", _ticks, (_lastreport_sv-_period_begin), buffer); |
|
|
|
DEBUG_MSG("[GEIGER] %s\n", data); |
|
|
|
#endif |
|
|
|
_ticks = 0; |
|
|
|
return value; |
|
|
|
} |
|
|
|
#endif |
|
|
|
return 0; |
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
// Handle interrupt calls |
|
|
|
void handleInterrupt(unsigned char gpio) { |
|
|
|
(void) gpio; |
|
|
|
static unsigned long last = 0; |
|
|
|
if (millis() - last > _debounce) { |
|
|
|
_events = _events + 1; |
|
|
|
_ticks = _ticks + 1; |
|
|
|
last = millis(); |
|
|
|
} |
|
|
|
} |
|
|
|
|
|
|
|
protected: |
|
|
|
|
|
|
|
// --------------------------------------------------------------------- |
|
|
|
// Interrupt management |
|
|
|
// --------------------------------------------------------------------- |
|
|
|
|
|
|
|
void _attach(GeigerSensor * instance, unsigned char gpio, unsigned char mode); |
|
|
|
void _detach(unsigned char gpio); |
|
|
|
|
|
|
|
void _enableInterrupts(bool value) { |
|
|
|
|
|
|
|
static unsigned char _interrupt_gpio = GPIO_NONE; |
|
|
|
|
|
|
|
if (value) { |
|
|
|
if (_interrupt_gpio != GPIO_NONE) _detach(_interrupt_gpio); |
|
|
|
_attach(this, _gpio, _interrupt_mode); |
|
|
|
_interrupt_gpio = _gpio; |
|
|
|
} else if (_interrupt_gpio != GPIO_NONE) { |
|
|
|
_detach(_interrupt_gpio); |
|
|
|
_interrupt_gpio = GPIO_NONE; |
|
|
|
} |
|
|
|
|
|
|
|
} |
|
|
|
|
|
|
|
// --------------------------------------------------------------------- |
|
|
|
// Protected |
|
|
|
// --------------------------------------------------------------------- |
|
|
|
|
|
|
|
volatile unsigned long _events = 0; |
|
|
|
volatile unsigned long _ticks = 0; |
|
|
|
|
|
|
|
unsigned long _debounce = GEIGER_DEBOUNCE; |
|
|
|
unsigned int _cpm2sievert = GEIGER_CPM2SIEVERT; |
|
|
|
unsigned char _gpio; |
|
|
|
unsigned char _mode; |
|
|
|
unsigned char _interrupt_mode; |
|
|
|
|
|
|
|
// Added for µSievert calculations |
|
|
|
unsigned long _lastreport_cpm = millis(); |
|
|
|
unsigned long _lastreport_sv = _lastreport_cpm; |
|
|
|
|
|
|
|
}; |
|
|
|
|
|
|
|
// ----------------------------------------------------------------------------- |
|
|
|
// Interrupt helpers |
|
|
|
// ----------------------------------------------------------------------------- |
|
|
|
|
|
|
|
GeigerSensor * _geiger_sensor_instance[10] = {NULL}; |
|
|
|
|
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr(unsigned char gpio) { |
|
|
|
unsigned char index = gpio > 5 ? gpio-6 : gpio; |
|
|
|
if (_geiger_sensor_instance[index]) { |
|
|
|
_geiger_sensor_instance[index]->handleInterrupt(gpio); |
|
|
|
} |
|
|
|
} |
|
|
|
|
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_0() { |
|
|
|
_geiger_sensor_isr(0); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_1() { |
|
|
|
_geiger_sensor_isr(1); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_2() { |
|
|
|
_geiger_sensor_isr(2); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_3() { |
|
|
|
_geiger_sensor_isr(3); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_4() { |
|
|
|
_geiger_sensor_isr(4); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_5() { |
|
|
|
_geiger_sensor_isr(5); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_12() { |
|
|
|
_geiger_sensor_isr(12); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_13() { |
|
|
|
_geiger_sensor_isr(13); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_14() { |
|
|
|
_geiger_sensor_isr(14); |
|
|
|
} |
|
|
|
void ICACHE_RAM_ATTR _geiger_sensor_isr_15() { |
|
|
|
_geiger_sensor_isr(15); |
|
|
|
} |
|
|
|
|
|
|
|
static void (*_geiger_sensor_isr_list[10])() = { |
|
|
|
_geiger_sensor_isr_0, _geiger_sensor_isr_1, _geiger_sensor_isr_2, |
|
|
|
_geiger_sensor_isr_3, _geiger_sensor_isr_4, _geiger_sensor_isr_5, |
|
|
|
_geiger_sensor_isr_12, _geiger_sensor_isr_13, _geiger_sensor_isr_14, |
|
|
|
_geiger_sensor_isr_15 |
|
|
|
}; |
|
|
|
|
|
|
|
void GeigerSensor::_attach(GeigerSensor * instance, unsigned char gpio, unsigned char mode) { |
|
|
|
if (!gpioValid(gpio)) return; |
|
|
|
_detach(gpio); |
|
|
|
unsigned char index = gpio > 5 ? gpio-6 : gpio; |
|
|
|
_geiger_sensor_instance[index] = instance; |
|
|
|
attachInterrupt(gpio, _geiger_sensor_isr_list[index], mode); |
|
|
|
#if SENSOR_DEBUG |
|
|
|
DEBUG_MSG_P(PSTR("[GEIGER] GPIO%d interrupt attached to %s\n"), gpio, instance->description().c_str()); |
|
|
|
#endif |
|
|
|
} |
|
|
|
|
|
|
|
void GeigerSensor::_detach(unsigned char gpio) { |
|
|
|
if (!gpioValid(gpio)) return; |
|
|
|
unsigned char index = gpio > 5 ? gpio-6 : gpio; |
|
|
|
if (_geiger_sensor_instance[index]) { |
|
|
|
detachInterrupt(gpio); |
|
|
|
#if SENSOR_DEBUG |
|
|
|
DEBUG_MSG_P(PSTR("[GEIGER] GPIO%d interrupt detached from %s\n"), gpio, _geiger_sensor_instance[index]->description().c_str()); |
|
|
|
#endif |
|
|
|
_geiger_sensor_instance[index] = NULL; |
|
|
|
} |
|
|
|
} |
|
|
|
|
|
|
|
#endif // SENSOR_SUPPORT && GEIGER_SUPPORT |

 Xose Pérez
7 years ago
Xose Pérez
7 years ago
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}