
You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
Tree:
7c5ef4060e
develop
gh-pages
master
riot
xap
arm-dac-work
audio_out
better_chibios_wait
changelog
cmake-experiments
dd_joystick
dependabot/github_actions/actions/labeler-5
dependabot/pip/util/nix/pillow-10.3.0
deprecate_default_folder
docusaurus
edez2
eeprom_update
encoder_matrix
fix/just_return_false
gb_port
gc_switch
hidlamp
joystick_fixes
json_audio
json_custom_keycodes
keyboard_json_misc4
keyboard_overrides
kle2json_hyper
led_matrix_direct
list_maintainers
log_driver
make_cli_parsing
more_dd_eeprom
muon_light
muon_light_dc
peasy
peb
planck-ez-a5-high
planck_ez_wdg
planck_ez_with_5372
planck_light_rev2
planck_thk
post_sat75_updates
potentiometer
pre-develop-merge-nov20
python_optimizations
qmk_compile_build_keyboard
qmk_compile_improvements
qwiic_hub
qwiic_hud
rando_migrate1
refactor_process_record_kb_user
revert-17693-fix/pmw33xx-correct-angle-tune
rgb7seg
rm_solid_color
subatomic
subatomic_encoders
subvendor_ids
titmlb
unorthodox
xmega_support
v4.0
user-keymaps-still-present
preonic-2.0
preonic-1.0
planck-light-1.0
planck-6.1
planck-6.0
planck-5.0
planck-4.2
planck-4.1
planck-4.0
gh60-0.1
ergodox_ez-161205
drop-1.0.0
breakpoint_2024_05_26
breakpoint_2024_02_25
breakpoint_2023_11_26
breakpoint_2023_08_27
breakpoint_2023_05_28
breakpoint_2023_02_26
breakpoint_2022_11_26
breakpoint_2022_08_27
breakpoint_2022_05_28
breakpoint_2021_11_27
breakpoint_2021_08_28
breakpoint_2021_05_29
breakpoint_2020_02_29
breakpoint_2019_11_30
breakpoint_2019_08_30
LUFA-170418
LUFA-151115
LUFA-140928
LUFA-140302
LUFA-130901-BETA
LUFA-130901
LUFA-111009
0.9.9
0.9.8
0.9.7
0.9.6
0.9.59
0.9.58
0.9.57
0.9.56
0.9.55
0.9.54
0.9.53
0.9.52
0.9.51
0.9.50
0.9.5
0.9.49
0.9.48
0.9.47
0.9.46
0.9.45
0.9.44
0.9.43
0.9.42
0.9.41
0.9.40
0.9.4
0.9.39
0.9.38
0.9.37
0.9.36
0.9.35
0.9.34
0.9.33
0.9.32
0.9.31
0.9.30
0.9.3
0.9.29
0.9.28
0.9.27
0.9.26
0.9.25
0.9.24
0.9.23
0.9.22
0.9.21
0.9.20
0.9.2
0.9.19
0.9.18
0.9.17
0.9.16
0.9.15
0.9.14
0.9.13
0.9.12
0.9.11
0.9.10
0.9.1
0.9.0
0.8.99
0.8.98
0.8.97
0.8.96
0.8.95
0.8.94
0.8.93
0.8.92
0.8.91
0.8.90
0.8.9
0.8.89
0.8.88
0.8.87
0.8.86
0.8.85
0.8.84
0.8.83
0.8.82
0.8.81
0.8.80
0.8.8
0.8.79
0.8.78
0.8.77
0.8.76
0.8.75
0.8.74
0.8.73
0.8.72
0.8.71
0.8.70
0.8.7
0.8.69
0.8.68
0.8.67
0.8.66
0.8.65
0.8.64
0.8.63
0.8.62
0.8.61
0.8.60
0.8.6
0.8.59
0.8.58
0.8.57
0.8.56
0.8.55
0.8.54
0.8.53
0.8.52
0.8.51
0.8.50
0.8.5
0.8.49
0.8.48
0.8.47
0.8.46
0.8.45
0.8.44
0.8.43
0.8.42
0.8.41
0.8.40
0.8.4
0.8.39
0.8.38
0.8.37
0.8.36
0.8.35
0.8.34
0.8.33
0.8.32
0.8.31
0.8.30
0.8.3
0.8.29
0.8.28
0.8.27
0.8.26
0.8.25
0.8.24
0.8.23
0.8.22
0.8.21
0.8.20
0.8.2
0.8.192
0.8.191
0.8.190
0.8.19
0.8.189
0.8.188
0.8.187
0.8.186
0.8.185
0.8.184
0.8.183
0.8.182
0.8.181
0.8.180
0.8.18
0.8.179
0.8.178
0.8.177
0.8.176
0.8.175
0.8.174
0.8.173
0.8.172
0.8.171
0.8.170
0.8.17
0.8.169
0.8.168
0.8.167
0.8.166
0.8.165
0.8.164
0.8.163
0.8.162
0.8.161
0.8.160
0.8.16
0.8.159
0.8.158
0.8.157
0.8.156
0.8.155
0.8.154
0.8.153
0.8.152
0.8.151
0.8.150
0.8.15
0.8.149
0.8.148
0.8.147
0.8.146
0.8.145
0.8.144
0.8.143
0.8.142
0.8.141
0.8.140
0.8.14
0.8.139
0.8.138
0.8.137
0.8.136
0.8.135
0.8.134
0.8.133
0.8.132
0.8.131
0.8.130
0.8.13
0.8.129
0.8.128
0.8.127
0.8.126
0.8.125
0.8.124
0.8.123
0.8.122
0.8.121
0.8.120
0.8.12
0.8.119
0.8.118
0.8.117
0.8.116
0.8.115
0.8.114
0.8.113
0.8.112
0.8.111
0.8.110
0.8.11
0.8.109
0.8.108
0.8.107
0.8.106
0.8.105
0.8.104
0.8.103
0.8.102
0.8.101
0.8.100
0.8.10
0.8.1
0.8.0
0.7.99
0.7.98
0.7.97
0.7.96
0.7.95
0.7.94
0.7.93
0.7.92
0.7.91
0.7.90
0.7.9
0.7.89
0.7.88
0.7.87
0.7.86
0.7.85
0.7.84
0.7.83
0.7.82
0.7.81
0.7.80
0.7.8
0.7.79
0.7.78
0.7.77
0.7.76
0.7.75
0.7.74
0.7.73
0.7.72
0.7.71
0.7.70
0.7.7
0.7.69
0.7.68
0.7.67
0.7.66
0.7.65
0.7.64
0.7.63
0.7.62
0.7.61
0.7.60
0.7.6
0.7.59
0.7.58
0.7.57
0.7.56
0.7.55
0.7.54
0.7.53
0.7.52
0.7.51
0.7.50
0.7.5
0.7.49
0.7.48
0.7.47
0.7.46
0.7.45
0.7.44
0.7.43
0.7.42
0.7.41
0.7.40
0.7.4
0.7.39
0.7.38
0.7.37
0.7.36
0.7.35
0.7.34
0.7.33
0.7.32
0.7.31
0.7.30
0.7.3
0.7.29
0.7.28
0.7.27
0.7.26
0.7.25
0.7.24
0.7.23
0.7.22
0.7.21
0.7.20
0.7.2
0.7.19
0.7.18
0.7.172
0.7.171
0.7.170
0.7.17
0.7.169
0.7.168
0.7.167
0.7.166
0.7.165
0.7.164
0.7.163
0.7.162
0.7.161
0.7.160
0.7.16
0.7.159
0.7.158
0.7.157
0.7.156
0.7.155
0.7.154
0.7.153
0.7.152
0.7.151
0.7.150
0.7.15
0.7.149
0.7.148
0.7.147
0.7.146
0.7.145
0.7.144
0.7.143
0.7.142
0.7.141
0.7.140
0.7.14
0.7.139
0.7.138
0.7.137
0.7.136
0.7.135
0.7.134
0.7.133
0.7.132
0.7.131
0.7.130
0.7.13
0.7.129
0.7.128
0.7.127
0.7.126
0.7.125
0.7.124
0.7.123
0.7.122
0.7.121
0.7.120
0.7.12
0.7.119
0.7.118
0.7.117
0.7.116
0.7.115
0.7.114
0.7.113
0.7.112
0.7.111
0.7.110
0.7.11
0.7.109
0.7.108
0.7.107
0.7.106
0.7.105
0.7.104
0.7.103
0.7.102
0.7.101
0.7.100
0.7.10
0.7.1
0.7.0
0.6.99
0.6.98
0.6.97
0.6.96
0.6.95
0.6.94
0.6.93
0.6.92
0.6.91
0.6.90
0.6.9
0.6.89
0.6.88
0.6.87
0.6.86
0.6.85
0.6.84
0.6.83
0.6.82
0.6.81
0.6.80
0.6.8
0.6.79
0.6.78
0.6.77
0.6.76
0.6.75
0.6.74
0.6.73
0.6.72
0.6.71
0.6.70
0.6.7
0.6.69
0.6.68
0.6.67
0.6.66
0.6.65
0.6.64
0.6.63
0.6.62
0.6.61
0.6.60
0.6.6
0.6.59
0.6.58
0.6.57
0.6.56
0.6.55
0.6.54
0.6.53
0.6.52
0.6.51
0.6.50
0.6.5
0.6.49
0.6.48
0.6.47
0.6.464
0.6.463
0.6.462
0.6.461
0.6.460
0.6.46
0.6.459
0.6.458
0.6.457
0.6.456
0.6.455
0.6.454
0.6.453
0.6.452
0.6.451
0.6.450
0.6.45
0.6.449
0.6.448
0.6.447
0.6.446
0.6.445
0.6.444
0.6.443
0.6.442
0.6.441
0.6.440
0.6.44
0.6.439
0.6.438
0.6.437
0.6.436
0.6.435
0.6.434
0.6.433
0.6.432
0.6.431
0.6.430
0.6.43
0.6.429
0.6.428
0.6.427
0.6.426
0.6.425
0.6.424
0.6.423
0.6.422
0.6.421
0.6.420
0.6.42
0.6.419
0.6.418
0.6.417
0.6.416
0.6.415
0.6.414
0.6.413
0.6.412
0.6.411
0.6.410
0.6.41
0.6.409
0.6.408
0.6.407
0.6.406
0.6.405
0.6.404
0.6.403
0.6.402
0.6.401
0.6.400
0.6.40
0.6.4
0.6.399
0.6.398
0.6.397
0.6.396
0.6.395
0.6.394
0.6.393
0.6.392
0.6.391
0.6.390
0.6.39
0.6.389
0.6.388
0.6.387
0.6.386
0.6.385
0.6.384
0.6.383
0.6.382
0.6.381
0.6.380
0.6.38
0.6.379
0.6.378
0.6.377
0.6.376
0.6.375
0.6.374
0.6.373
0.6.372
0.6.371
0.6.370
0.6.37
0.6.369
0.6.368
0.6.367
0.6.366
0.6.365
0.6.364
0.6.363
0.6.362
0.6.361
0.6.360
0.6.36
0.6.359
0.6.358
0.6.357
0.6.356
0.6.355
0.6.354
0.6.353
0.6.352
0.6.351
0.6.350
0.6.35
0.6.349
0.6.348
0.6.347
0.6.346
0.6.345
0.6.344
0.6.343
0.6.342
0.6.341
0.6.340
0.6.34
0.6.339
0.6.338
0.6.337
0.6.336
0.6.335
0.6.334
0.6.333
0.6.332
0.6.331
0.6.330
0.6.33
0.6.329
0.6.328
0.6.327
0.6.326
0.6.325
0.6.324
0.6.323
0.6.322
0.6.321
0.6.320
0.6.32
0.6.319
0.6.318
0.6.317
0.6.316
0.6.315
0.6.314
0.6.313
0.6.312
0.6.311
0.6.310
0.6.31
0.6.309
0.6.308
0.6.307
0.6.306
0.6.305
0.6.304
0.6.303
0.6.302
0.6.301
0.6.300
0.6.30
0.6.3
0.6.299
0.6.298
0.6.297
0.6.296
0.6.295
0.6.294
0.6.293
0.6.292
0.6.291
0.6.290
0.6.29
0.6.289
0.6.288
0.6.287
0.6.286
0.6.285
0.6.284
0.6.283
0.6.282
0.6.281
0.6.280
0.6.28
0.6.279
0.6.278
0.6.277
0.6.276
0.6.275
0.6.274
0.6.273
0.6.272
0.6.271
0.6.270
0.6.27
0.6.269
0.6.268
0.6.267
0.6.266
0.6.265
0.6.264
0.6.263
0.6.262
0.6.261
0.6.260
0.6.26
0.6.259
0.6.258
0.6.257
0.6.256
0.6.255
0.6.254
0.6.253
0.6.252
0.6.251
0.6.250
0.6.25
0.6.249
0.6.248
0.6.247
0.6.246
0.6.245
0.6.244
0.6.243
0.6.242
0.6.241
0.6.240
0.6.24
0.6.239
0.6.238
0.6.237
0.6.236
0.6.235
0.6.234
0.6.233
0.6.232
0.6.231
0.6.230
0.6.23
0.6.229
0.6.228
0.6.227
0.6.226
0.6.225
0.6.224
0.6.223
0.6.222
0.6.221
0.6.220
0.6.22
0.6.219
0.6.218
0.6.217
0.6.216
0.6.215
0.6.214
0.6.213
0.6.212
0.6.211
0.6.210
0.6.21
0.6.209
0.6.208
0.6.207
0.6.206
0.6.205
0.6.204
0.6.203
0.6.202
0.6.201
0.6.200
0.6.20
0.6.2
0.6.199
0.6.198
0.6.197
0.6.196
0.6.195
0.6.194
0.6.193
0.6.192
0.6.191
0.6.190
0.6.19
0.6.189
0.6.188
0.6.187
0.6.186
0.6.185
0.6.184
0.6.183
0.6.182
0.6.181
0.6.180
0.6.18
0.6.179
0.6.178
0.6.177
0.6.176
0.6.175
0.6.174
0.6.173
0.6.172
0.6.171
0.6.170
0.6.17
0.6.169
0.6.168
0.6.167
0.6.166
0.6.165
0.6.164
0.6.163
0.6.162
0.6.161
0.6.160
0.6.16
0.6.159
0.6.158
0.6.157
0.6.156
0.6.155
0.6.154
0.6.153
0.6.152
0.6.151
0.6.150
0.6.15
0.6.149
0.6.148
0.6.147
0.6.146
0.6.145
0.6.144
0.6.143
0.6.142
0.6.141
0.6.140
0.6.14
0.6.139
0.6.138
0.6.137
0.6.136
0.6.135
0.6.134
0.6.133
0.6.132
0.6.131
0.6.130
0.6.13
0.6.129
0.6.128
0.6.127
0.6.126
0.6.125
0.6.124
0.6.123
0.6.122
0.6.121
0.6.120
0.6.12
0.6.119
0.6.118
0.6.117
0.6.116
0.6.115
0.6.114
0.6.113
0.6.112
0.6.111
0.6.110
0.6.11
0.6.109
0.6.108
0.6.107
0.6.106
0.6.105
0.6.104
0.6.103
0.6.102
0.6.101
0.6.100
0.6.10
0.6.1
0.6.0
0.5.99
0.5.98
0.5.97
0.5.96
0.5.95
0.5.94
0.5.93
0.5.92
0.5.91
0.5.90
0.5.9
0.5.89
0.5.88
0.5.87
0.5.86
0.5.85
0.5.84
0.5.83
0.5.82
0.5.81
0.5.80
0.5.8
0.5.79
0.5.78
0.5.77
0.5.76
0.5.75
0.5.74
0.5.73
0.5.72
0.5.71
0.5.70
0.5.7
0.5.69
0.5.68
0.5.67
0.5.66
0.5.65
0.5.64
0.5.63
0.5.62
0.5.61
0.5.60
0.5.6
0.5.59
0.5.58
0.5.57
0.5.56
0.5.55
0.5.54
0.5.53
0.5.52
0.5.51
0.5.50
0.5.5
0.5.49
0.5.48
0.5.47
0.5.46
0.5.45
0.5.44
0.5.43
0.5.42
0.5.41
0.5.40
0.5.4
0.5.39
0.5.38
0.5.37
0.5.36
0.5.35
0.5.34
0.5.33
0.5.32
0.5.31
0.5.30
0.5.3
0.5.29
0.5.28
0.5.27
0.5.264
0.5.263
0.5.262
0.5.261
0.5.260
0.5.26
0.5.259
0.5.258
0.5.257
0.5.256
0.5.255
0.5.254
0.5.253
0.5.252
0.5.251
0.5.250
0.5.25
0.5.249
0.5.248
0.5.247
0.5.246
0.5.245
0.5.244
0.5.243
0.5.242
0.5.241
0.5.240
0.5.24
0.5.239
0.5.238
0.5.237
0.5.236
0.5.235
0.5.234
0.5.233
0.5.232
0.5.231
0.5.230
0.5.23
0.5.229
0.5.228
0.5.227
0.5.226
0.5.225
0.5.224
0.5.223
0.5.222
0.5.221
0.5.220
0.5.22
0.5.219
0.5.218
0.5.217
0.5.216
0.5.215
0.5.214
0.5.213
0.5.212
0.5.211
0.5.210
0.5.21
0.5.209
0.5.208
0.5.207
0.5.206
0.5.205
0.5.204
0.5.203
0.5.202
0.5.201
0.5.200
0.5.20
0.5.2
0.5.199
0.5.198
0.5.197
0.5.196
0.5.195
0.5.194
0.5.193
0.5.192
0.5.191
0.5.190
0.5.189
0.5.188
0.5.187
0.5.186
0.5.185
0.5.184
0.5.183
0.5.182
0.5.181
0.5.180
0.5.179
0.5.178
0.5.177
0.5.176
0.5.175
0.5.174
0.5.173
0.5.172
0.5.171
0.5.170
0.5.17
0.5.169
0.5.168
0.5.167
0.5.166
0.5.165
0.5.164
0.5.163
0.5.162
0.5.161
0.5.160
0.5.16
0.5.159
0.5.158
0.5.157
0.5.156
0.5.155
0.5.154
0.5.153
0.5.152
0.5.151
0.5.150
0.5.15
0.5.149
0.5.148
0.5.147
0.5.146
0.5.145
0.5.144
0.5.143
0.5.142
0.5.141
0.5.140
0.5.14
0.5.139
0.5.138
0.5.137
0.5.136
0.5.135
0.5.134
0.5.133
0.5.132
0.5.131
0.5.130
0.5.13
0.5.129
0.5.128
0.5.127
0.5.126
0.5.125
0.5.124
0.5.123
0.5.122
0.5.121
0.5.120
0.5.12
0.5.119
0.5.118
0.5.117
0.5.116
0.5.115
0.5.114
0.5.113
0.5.112
0.5.111
0.5.110
0.5.11
0.5.109
0.5.108
0.5.107
0.5.106
0.5.105
0.5.104
0.5.103
0.5.102
0.5.101
0.5.100
0.5.10
0.5.1
0.5.0
0.25.4
0.25.3
0.25.2
0.25.1
0.25.0
0.24.9
0.24.8
0.24.7
0.24.6
0.24.5
0.24.4
0.24.3
0.24.2
0.24.11
0.24.10
0.24.1
0.24.0
0.23.9
0.23.8
0.23.7
0.23.6
0.23.5
0.23.4
0.23.3
0.23.2
0.23.1
0.23.0
0.22.9
0.22.8
0.22.7
0.22.6
0.22.5
0.22.4
0.22.3
0.22.2
0.22.14
0.22.13
0.22.12
0.22.11
0.22.10
0.22.1
0.22.0
0.21.7
0.21.6
0.21.5
0.21.4
0.21.3
0.21.2
0.21.1
0.21.0
0.20.8
0.20.7
0.20.6
0.20.5
0.20.4
0.20.3
0.20.2
0.20.1
0.20.0
0.19.9
0.19.8
0.19.7
0.19.6
0.19.5
0.19.4
0.19.3
0.19.2
0.19.12
0.19.11
0.19.10
0.19.1
0.19.0
0.18.9
0.18.8
0.18.7
0.18.6
0.18.5
0.18.4
0.18.3
0.18.2
0.18.17
0.18.16
0.18.15
0.18.14
0.18.13
0.18.12
0.18.11
0.18.10
0.18.1
0.18.0
0.17.9
0.17.8
0.17.7
0.17.6
0.17.5
0.17.4
0.17.3
0.17.2
0.17.1
0.17.0
0.16.9
0.16.8
0.16.7
0.16.6
0.16.5
0.16.4
0.16.3
0.16.2
0.16.1
0.16.0
0.15.9
0.15.8
0.15.7
0.15.6
0.15.5
0.15.4
0.15.3
0.15.25
0.15.24
0.15.23
0.15.22
0.15.21
0.15.20
0.15.2
0.15.19
0.15.18
0.15.17
0.15.16
0.15.15
0.15.14
0.15.13
0.15.12
0.15.11
0.15.10
0.15.1
0.15.0
0.14.9
0.14.8
0.14.7
0.14.6
0.14.5
0.14.4
0.14.33
0.14.32
0.14.31
0.14.30
0.14.3
0.14.29
0.14.28
0.14.27
0.14.26
0.14.25
0.14.24
0.14.23
0.14.22
0.14.21
0.14.20
0.14.2
0.14.19
0.14.18
0.14.17
0.14.16
0.14.15
0.14.14
0.14.13
0.14.12
0.14.11
0.14.10
0.14.1
0.14.0
0.13.9
0.13.8
0.13.7
0.13.6
0.13.5
0.13.4
0.13.38
0.13.37
0.13.36
0.13.35
0.13.34
0.13.33
0.13.32
0.13.31
0.13.30
0.13.3
0.13.29
0.13.28
0.13.27
0.13.26
0.13.25
0.13.24
0.13.23
0.13.22
0.13.21
0.13.20
0.13.2
0.13.19
0.13.18
0.13.17
0.13.16
0.13.15
0.13.14
0.13.13
0.13.12
0.13.11
0.13.10
0.13.1
0.13.0
0.12.9
0.12.8
0.12.7
0.12.6
0.12.52
0.12.51
0.12.50
0.12.5
0.12.49
0.12.48
0.12.47
0.12.46
0.12.45
0.12.44
0.12.43
0.12.42
0.12.41
0.12.40
0.12.4
0.12.39
0.12.38
0.12.37
0.12.36
0.12.35
0.12.34
0.12.33
0.12.32
0.12.31
0.12.30
0.12.3
0.12.29
0.12.28
0.12.27
0.12.26
0.12.25
0.12.24
0.12.23
0.12.22
0.12.21
0.12.20
0.12.2
0.12.19
0.12.18
0.12.17
0.12.16
0.12.15
0.12.14
0.12.13
0.12.12
0.12.11
0.12.10
0.12.1
0.12.0
0.11.9
0.11.8
0.11.70
0.11.7
0.11.69
0.11.68
0.11.67
0.11.66
0.11.65
0.11.64
0.11.63
0.11.62
0.11.61
0.11.60
0.11.6
0.11.59
0.11.58
0.11.57
0.11.56
0.11.55
0.11.54
0.11.53
0.11.52
0.11.51
0.11.50
0.11.5
0.11.49
0.11.48
0.11.47
0.11.46
0.11.45
0.11.44
0.11.43
0.11.42
0.11.41
0.11.40
0.11.4
0.11.39
0.11.38
0.11.37
0.11.36
0.11.35
0.11.34
0.11.33
0.11.32
0.11.31
0.11.30
0.11.3
0.11.29
0.11.28
0.11.27
0.11.26
0.11.25
0.11.24
0.11.23
0.11.22
0.11.21
0.11.20
0.11.2
0.11.19
0.11.18
0.11.17
0.11.16
0.11.15
0.11.14
0.11.13
0.11.12
0.11.11
0.11.10
0.11.1
0.11.0
0.10.9
0.10.8
0.10.7
0.10.6
0.10.54
0.10.53
0.10.52
0.10.51
0.10.50
0.10.5
0.10.49
0.10.48
0.10.47
0.10.46
0.10.45
0.10.44
0.10.43
0.10.42
0.10.41
0.10.40
0.10.4
0.10.39
0.10.38
0.10.37
0.10.36
0.10.35
0.10.34
0.10.33
0.10.32
0.10.31
0.10.30
0.10.3
0.10.29
0.10.28
0.10.27
0.10.26
0.10.25
0.10.24
0.10.23
0.10.22
0.10.21
0.10.20
0.10.2
0.10.19
0.10.18
0.10.17
0.10.16
0.10.15
0.10.14
0.10.13
0.10.12
0.10.11
0.10.10
0.10.1
0.10.0
0.25.7
0.25.6
0.25.5
qmk_firmware/keyboards/earth_rover
 k.bigwheel
784a9cdca4
k.bigwheel
784a9cdca4
* Just ./util/new_keyboard.sh earth_rover * Update readme.md * Create key layout * Setup config.h * Add default keymap * Fix pins * Update flash command * Write info.json * Add reset instruction * Change bootloader setting * Format new C files * Empty commit for kicking CI * Update keyboards/earth_rover/config.h Co-authored-by: James Young <18669334+noroadsleft@users.noreply.github.com> * Update keyboards/earth_rover/keymaps/default/keymap.c Co-authored-by: James Young <18669334+noroadsleft@users.noreply.github.com> * Update readme.md * Update keyboards/earth_rover/readme.md Co-authored-by: James Young <18669334+noroadsleft@users.noreply.github.com> Co-authored-by: James Young <18669334+noroadsleft@users.noreply.github.com> |
3 years ago | |
|---|---|---|
| .. | ||
| keymaps/default | [Keyboard] Add earth_rover keyboard (#11405) | 3 years ago |
| config.h | [Keyboard] Add earth_rover keyboard (#11405) | 3 years ago |
| earth_rover.c | [Keyboard] Add earth_rover keyboard (#11405) | 3 years ago |
| earth_rover.h | [Keyboard] Add earth_rover keyboard (#11405) | 3 years ago |
| info.json | [Keyboard] Add earth_rover keyboard (#11405) | 3 years ago |
| readme.md | [Keyboard] Add earth_rover keyboard (#11405) | 3 years ago |
| rules.mk | [Keyboard] Add earth_rover keyboard (#11405) | 3 years ago |
readme.md
earth_rover
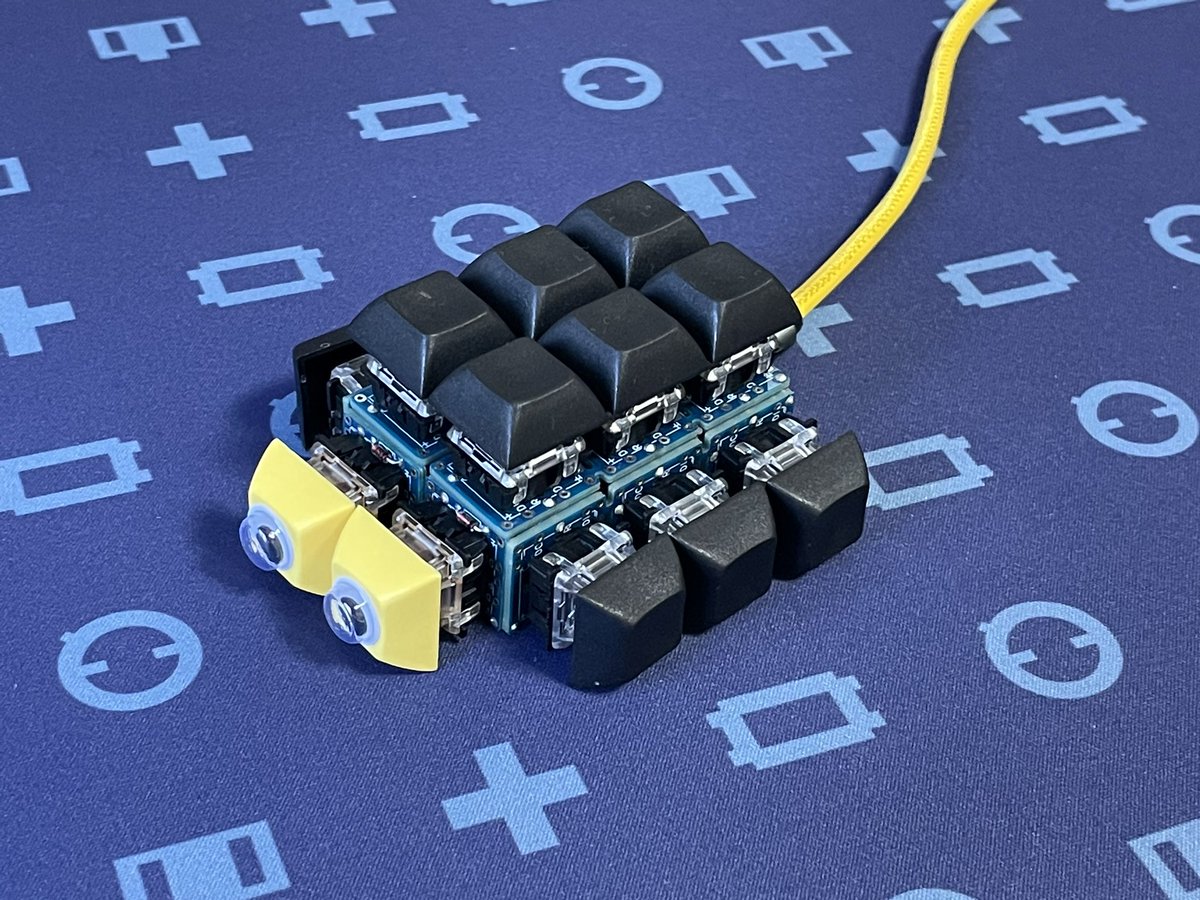
Mechanical warm, or just cubic macro pad.
- Keyboard Maintainer: k.bigwheel
- Build Guide: bigwheel/earth_rover
- Hardware Supported: 無限の可能性 | MxLEDBitPCB, Pro Micro
- Hardware Availability: 魔界鍵盤製作所 - BOOTH, Pro Micro (コンスルー付き) | 遊舎工房
Make example for this keyboard (after setting up your build environment):
make earth_rover:default
Reset Pro Micro by reset button on ProMicroSocket (Red LED must light).
Flashing example for this keyboard:
make earth_rover:default:flash
See the build environment setup and the make instructions for more information. Brand new to QMK? Start with our Complete Newbs Guide.